Pièces rigides et flexibles
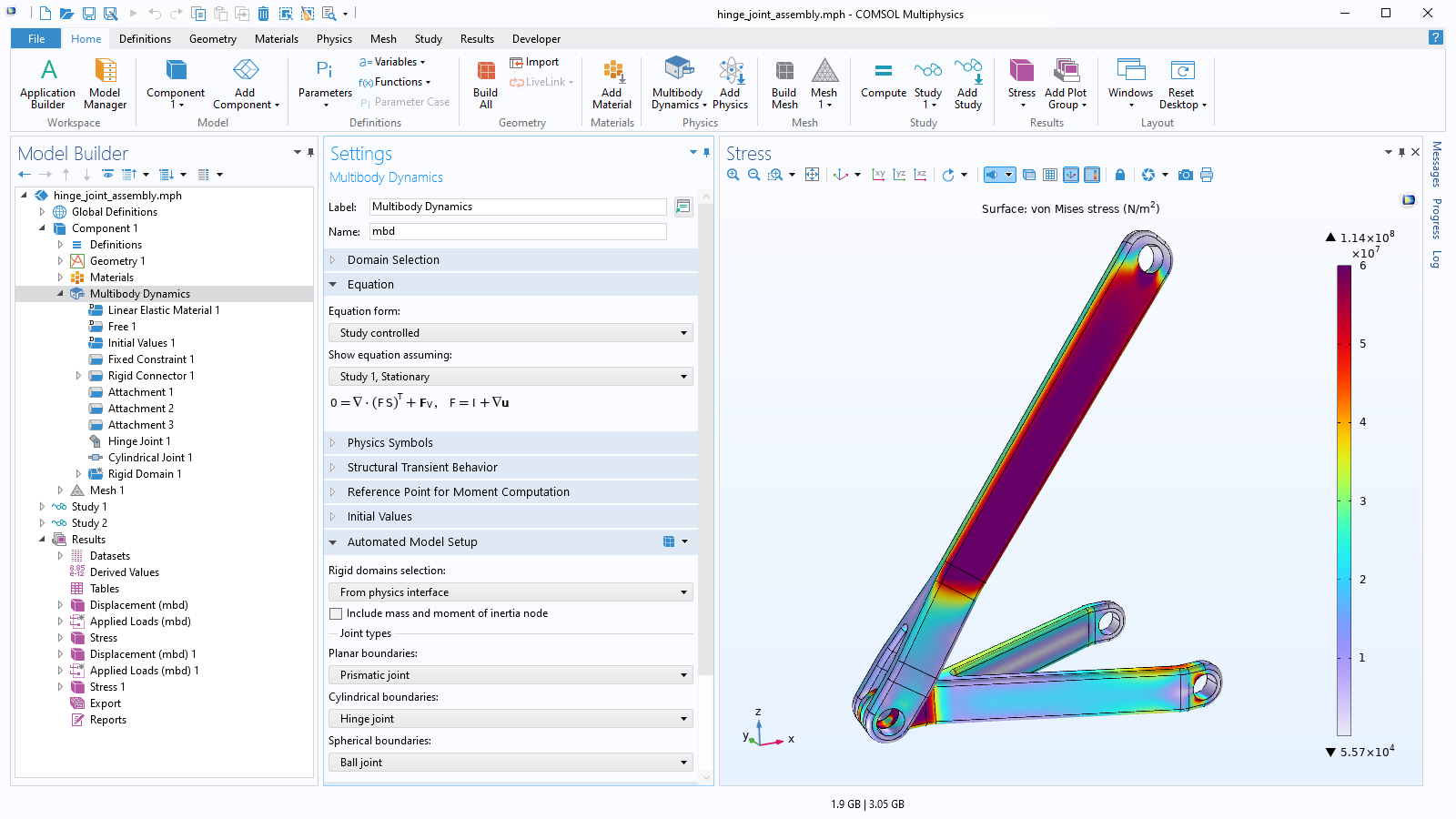
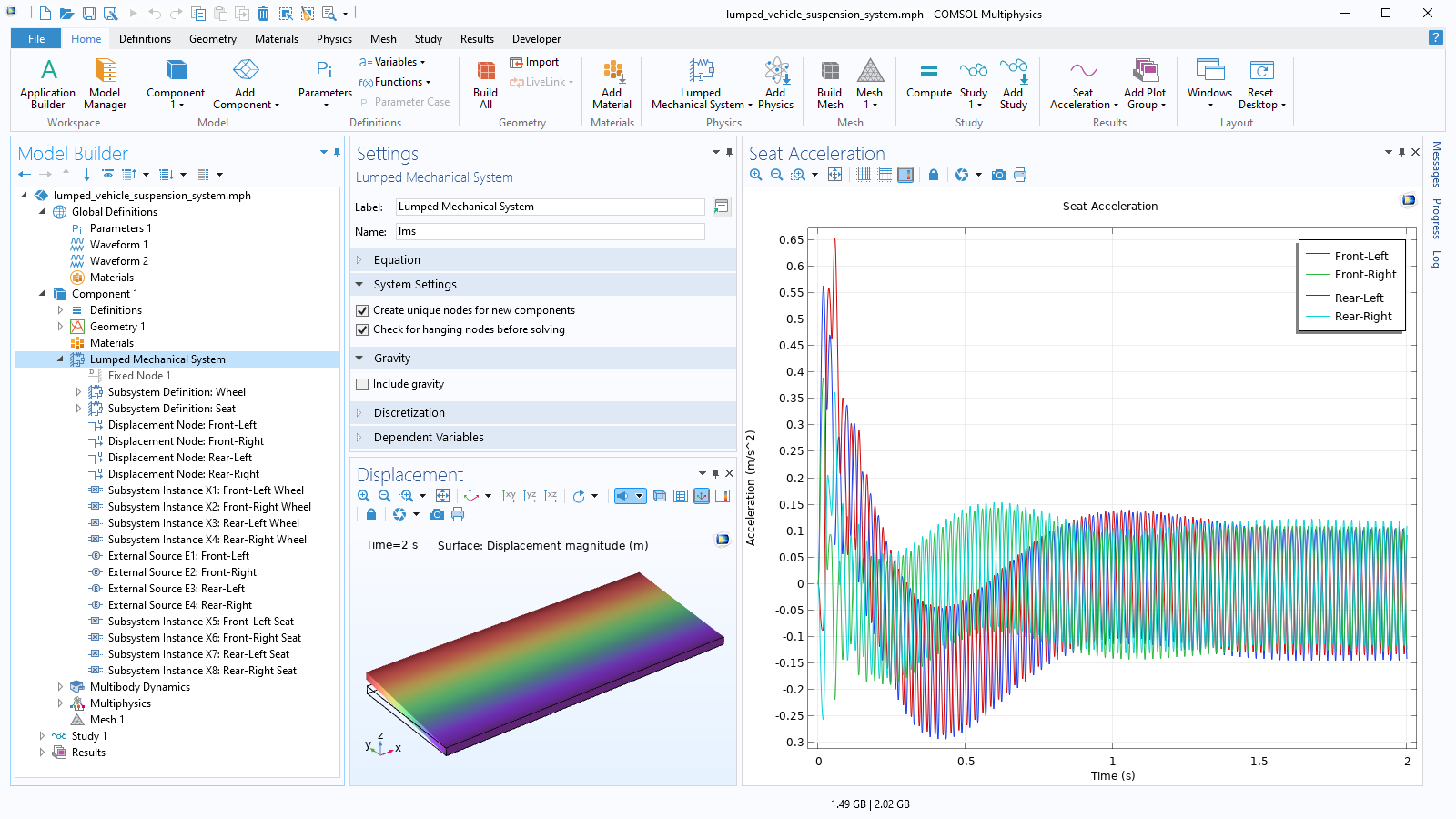
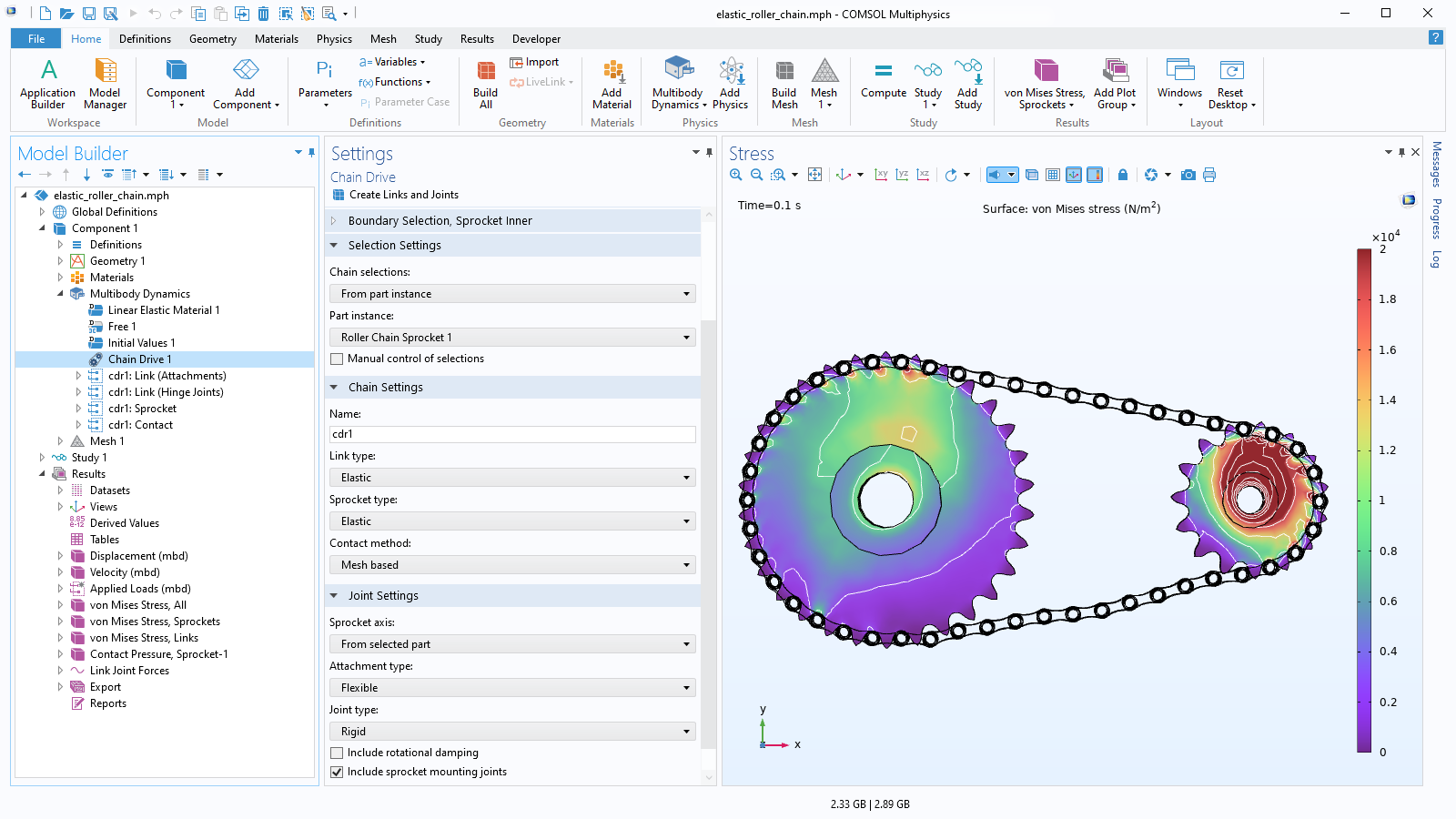
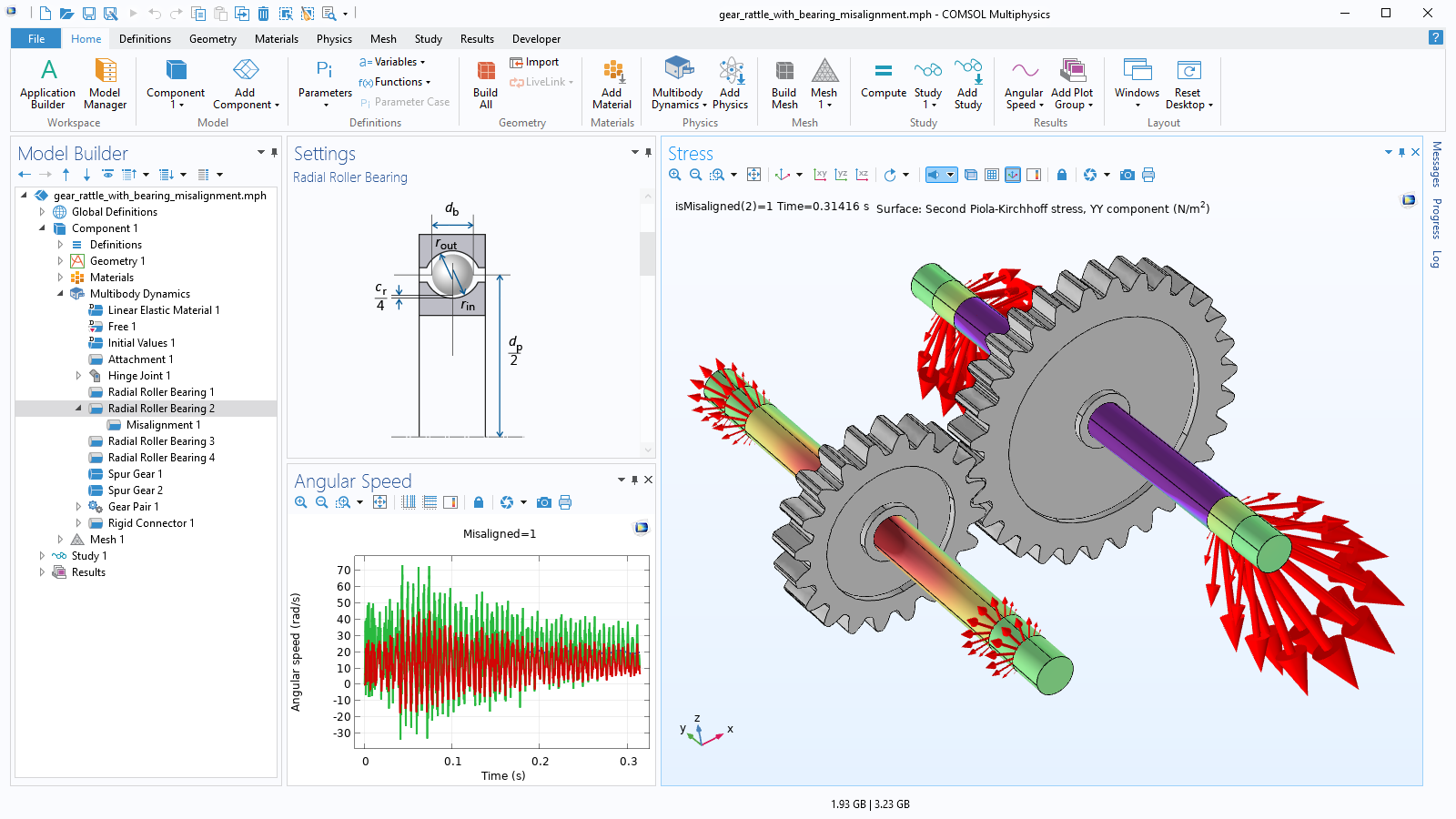
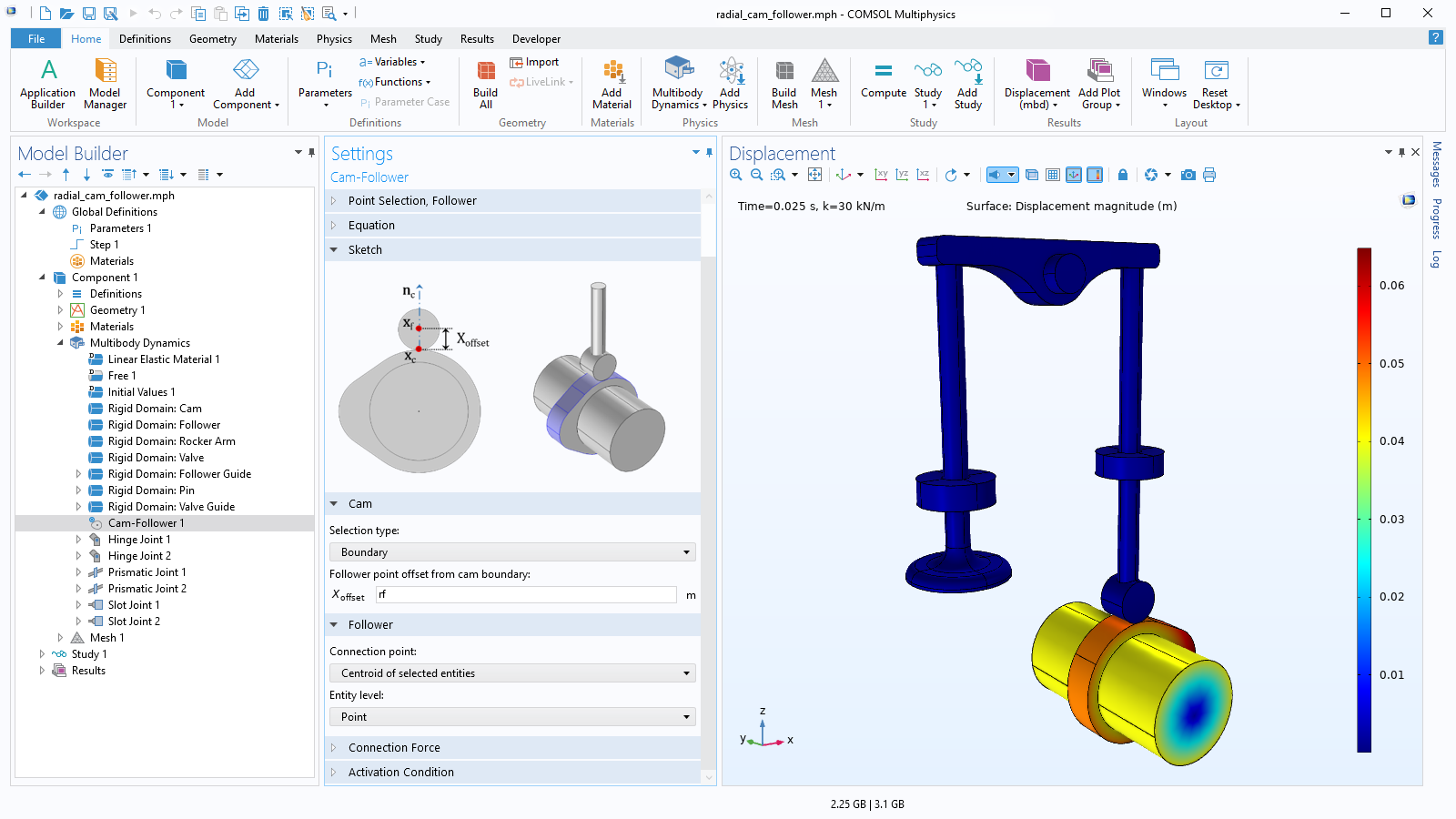
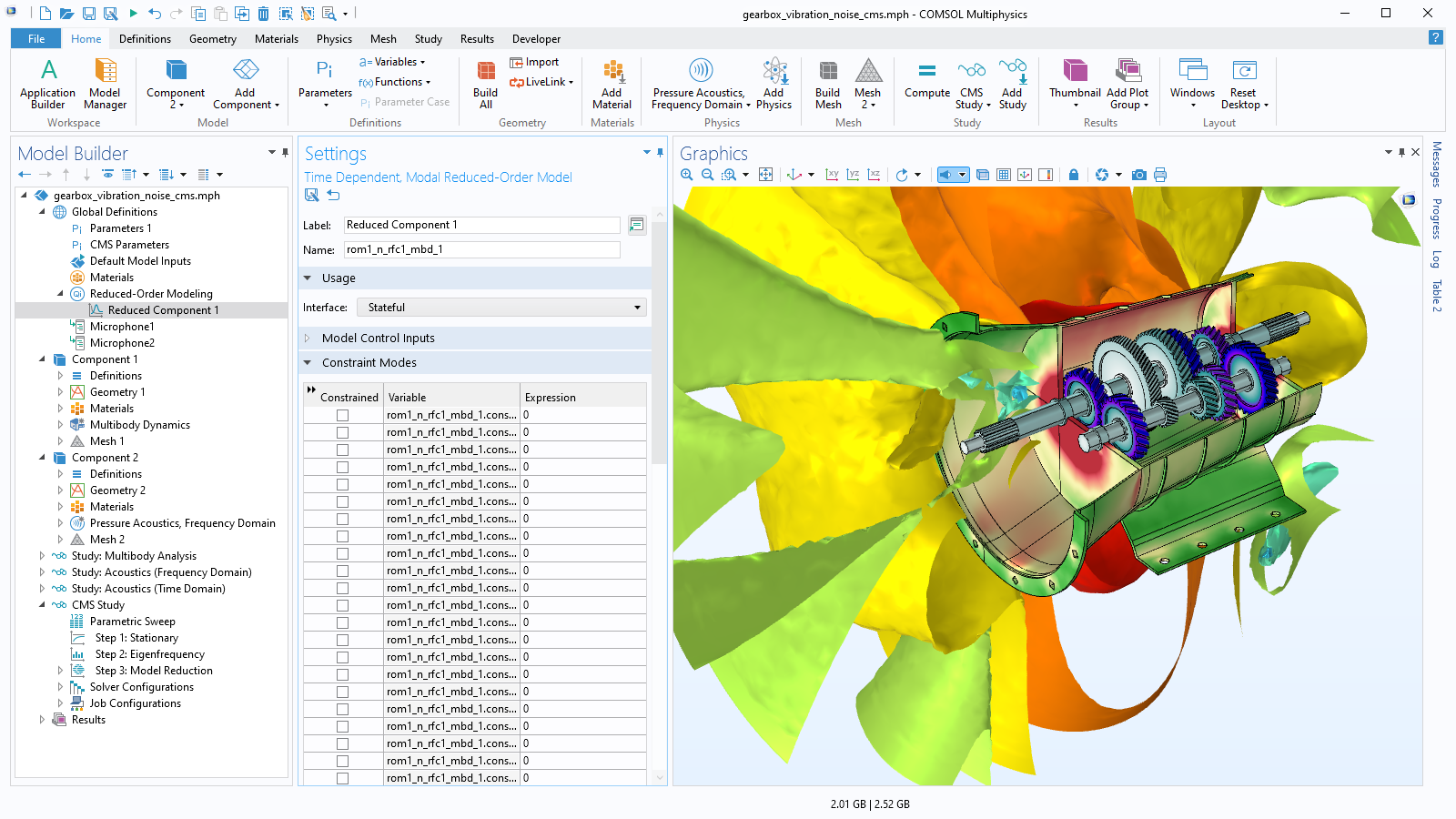
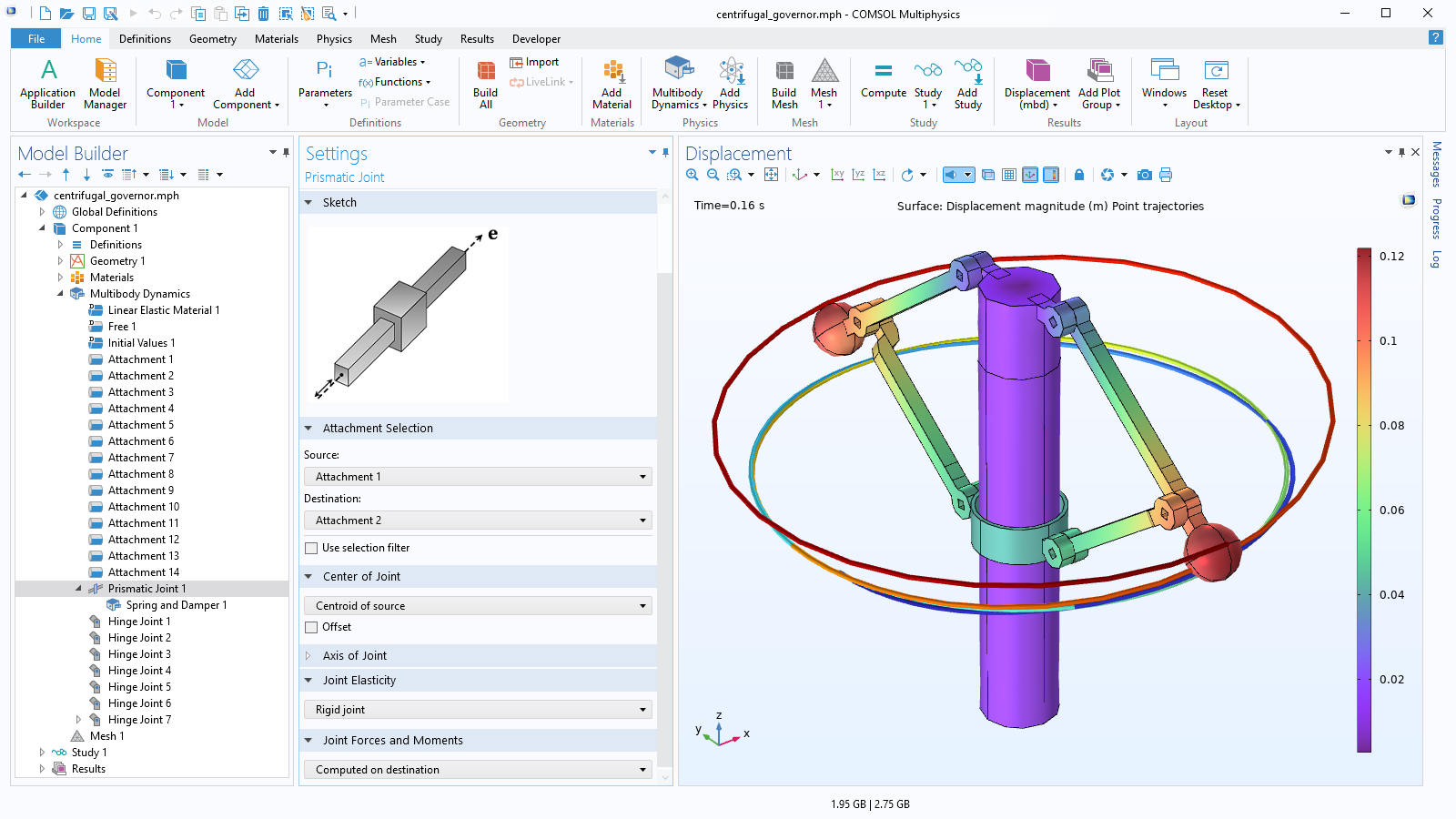
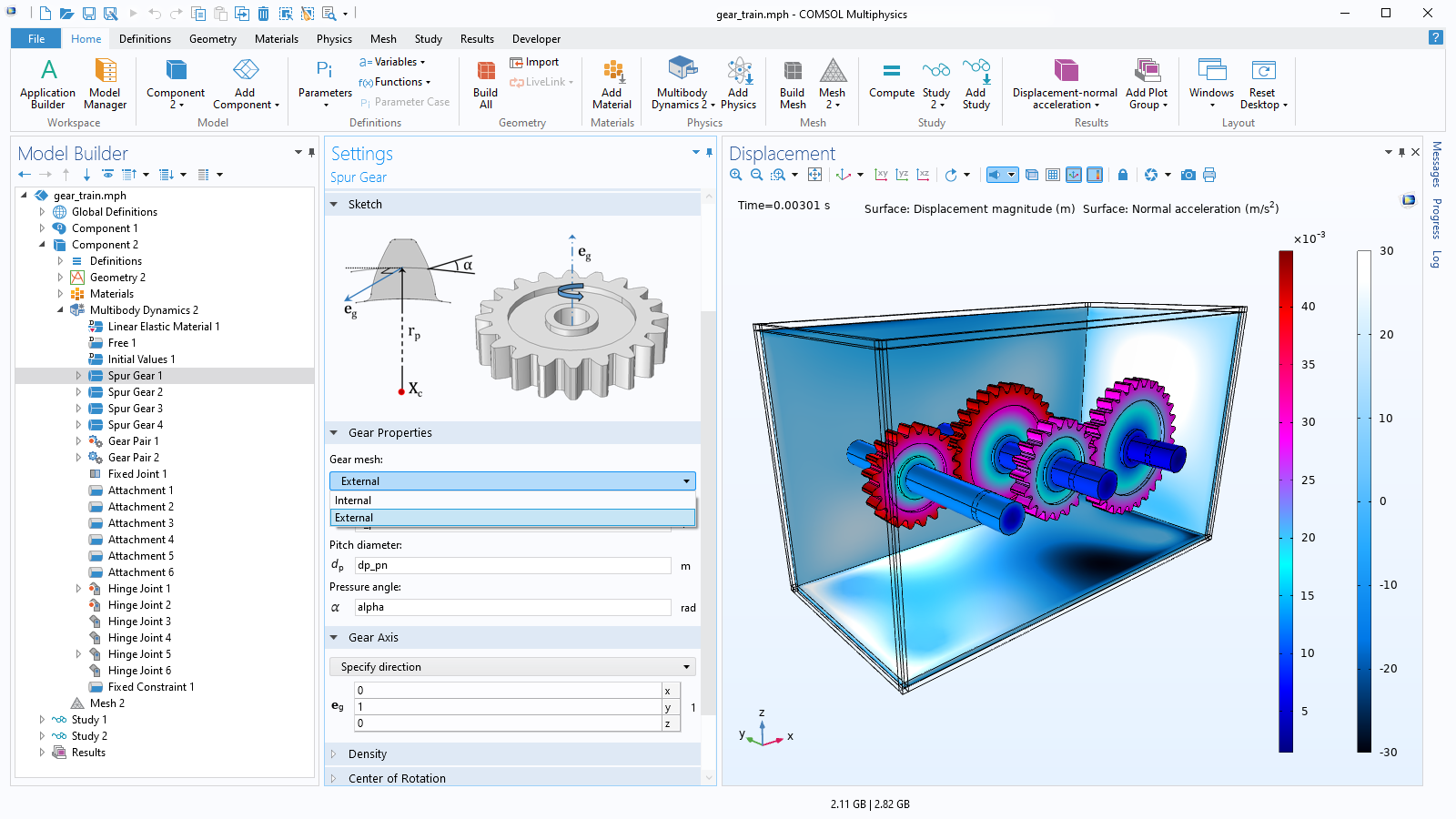
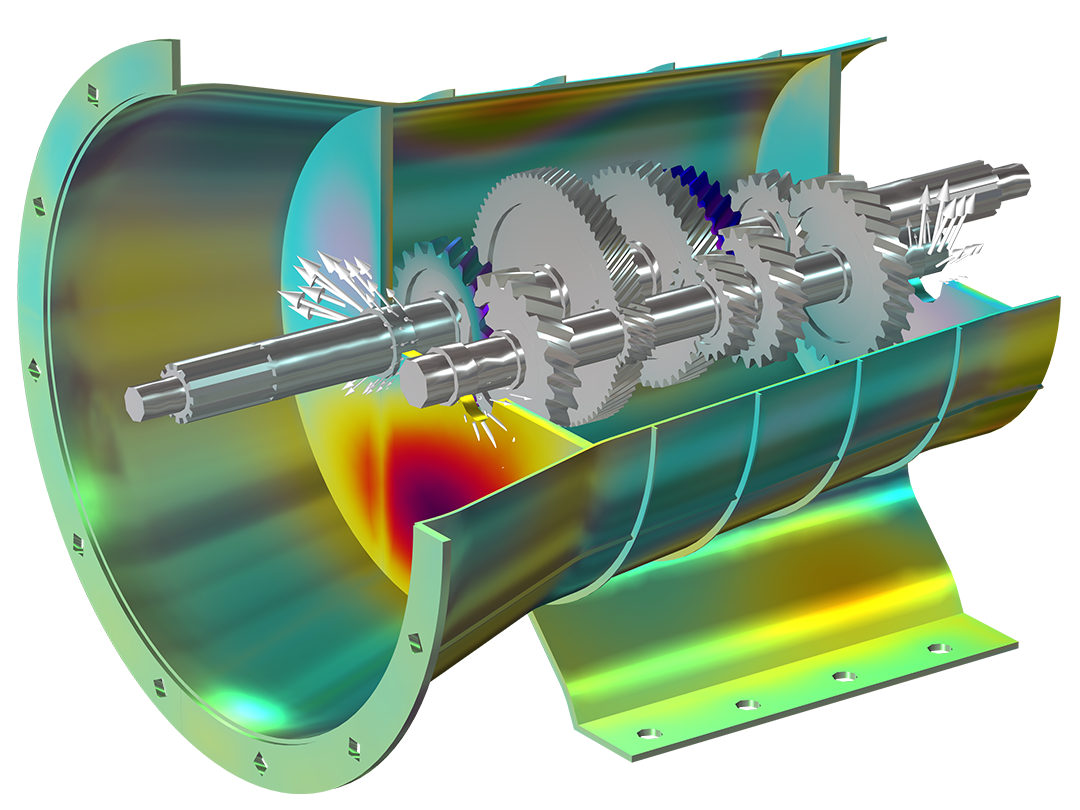
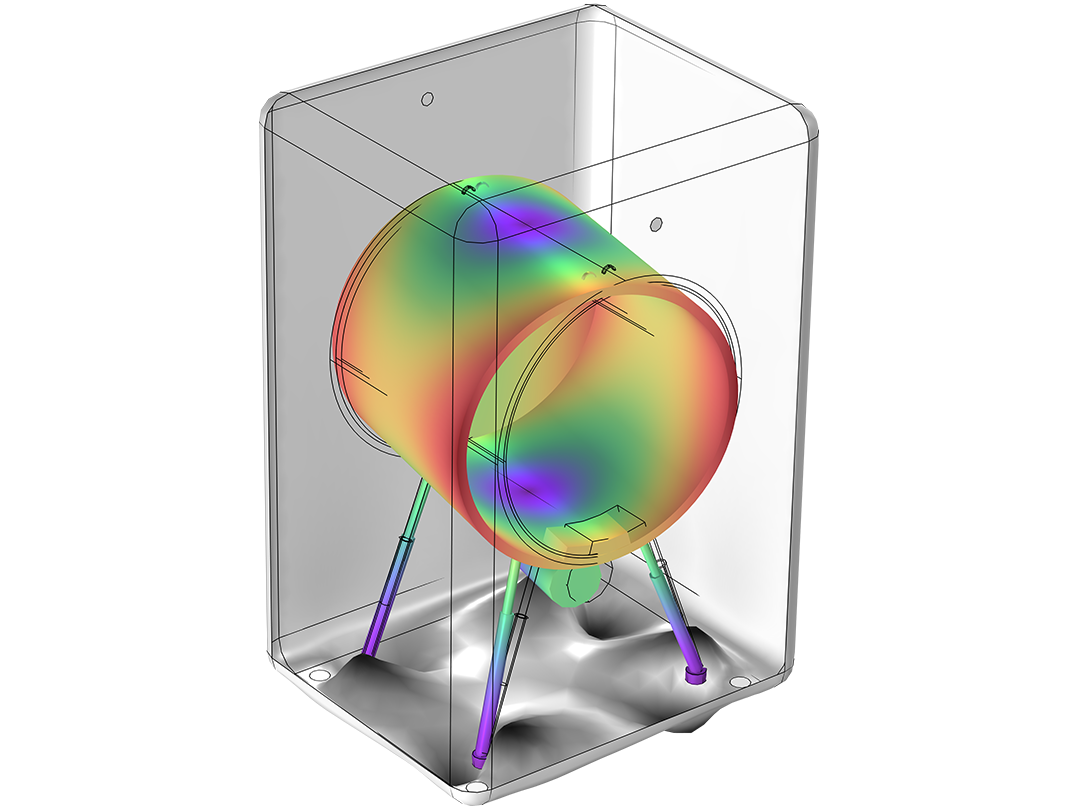
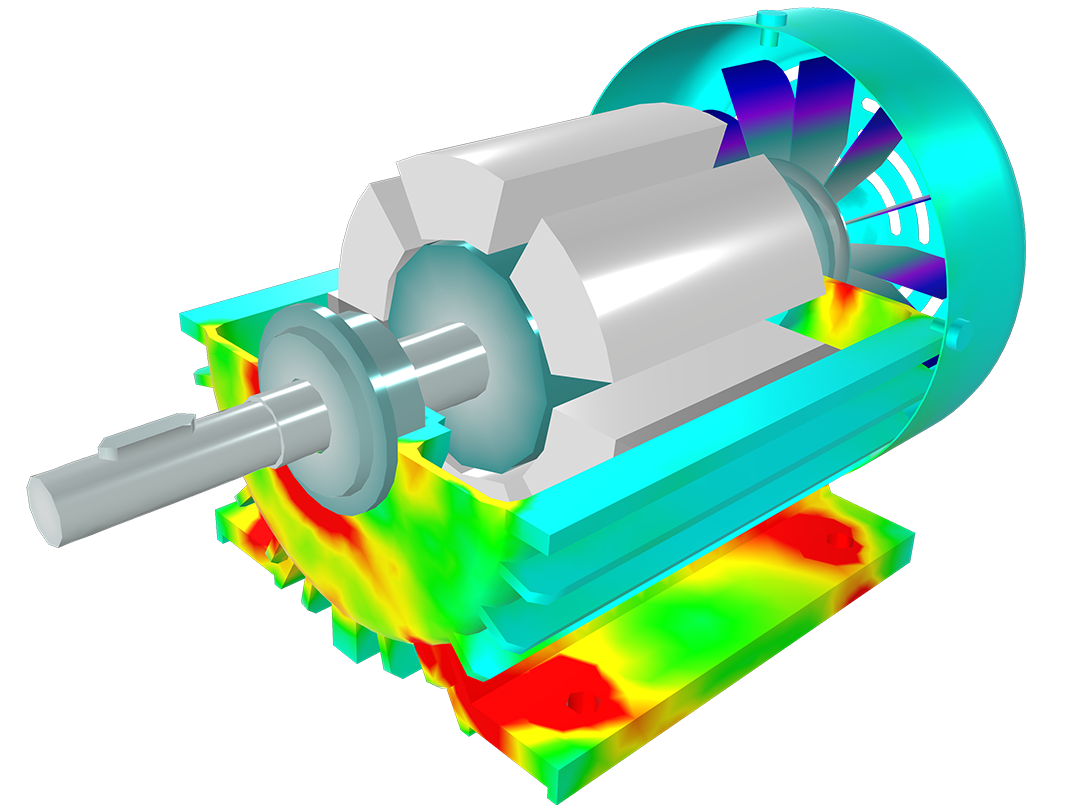
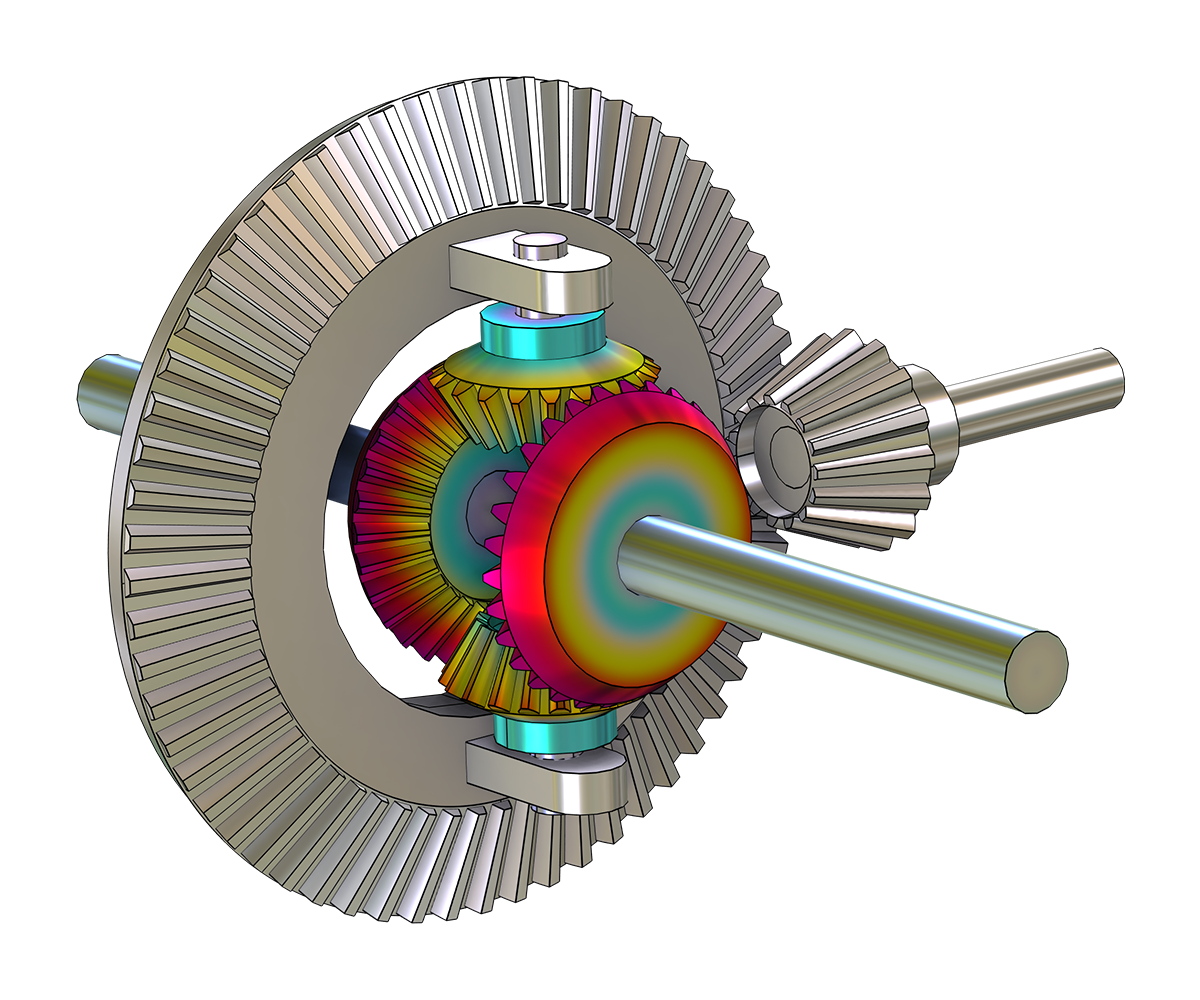
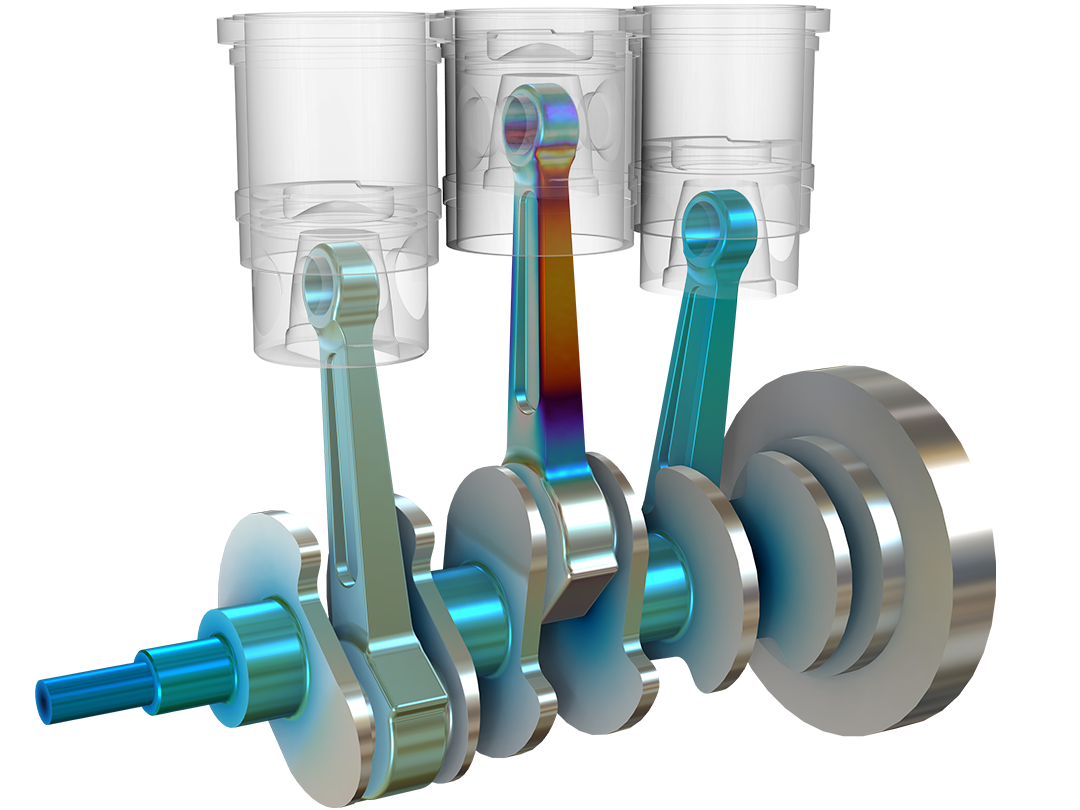
Dans la modélisation des systèmes multicorps, des pièces rigides et flexibles sont assemblées à l'aide de divers types de liaisons, d'engrenages, cames, roulements, ressorts ou encore amortisseurs, et sont soumis à de grands déplacements et de grandes rotations. L'un des avantages lorsque vous utilisez le module Multibody Dynamics est la facilité avec laquelle vous pouvez combiner des pièces rigides et flexibles dans vos systèmes multicorps.
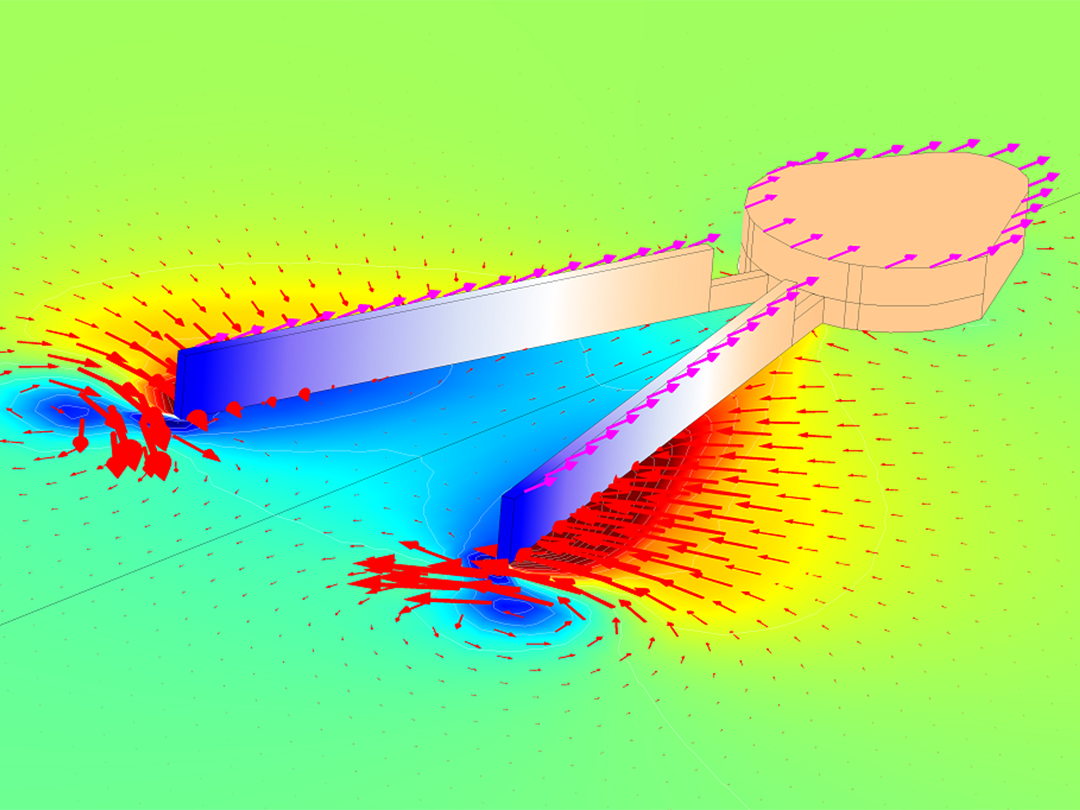
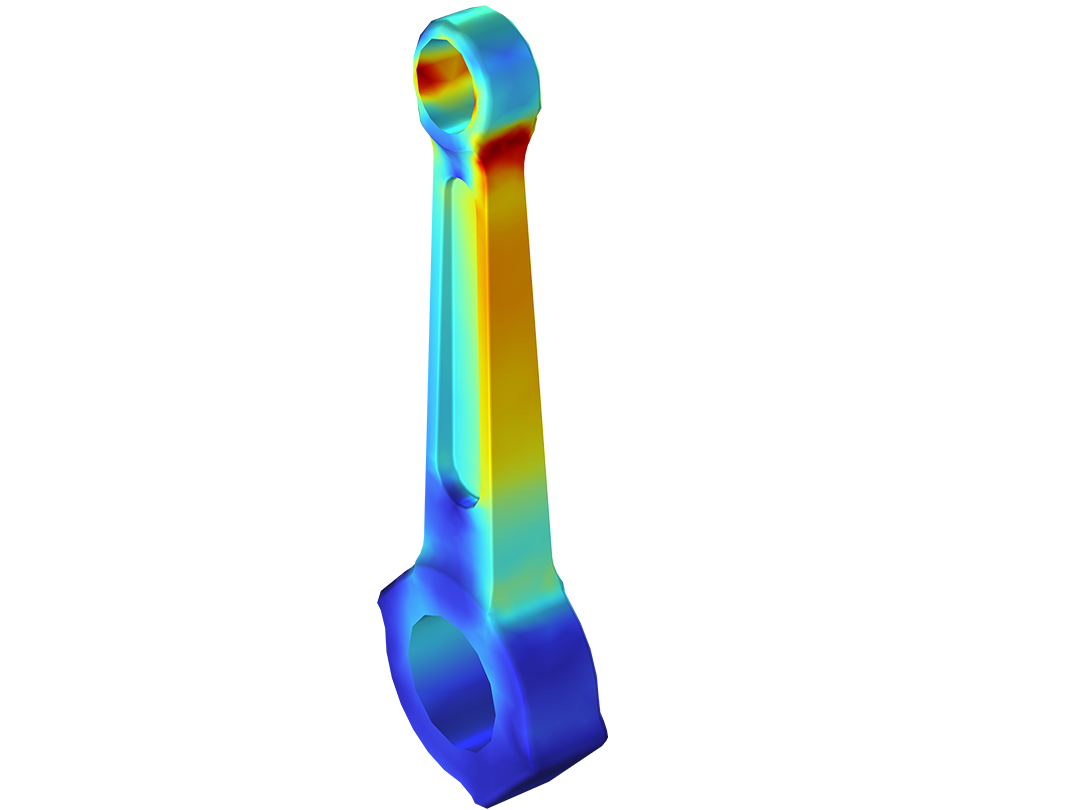
En général, dans une simulation multicorps, l'ensemble des pièces ou la majorité d'entre elles sont rigides et sont donc représentées uniquement par des degrés de liberté de corps rigide. Cependant, il vous sera peut être parfois nécessaire de simuler une ou plusieurs pièces comme étant flexibles. Avec les différentes lois de comportement incluses dans le module, vous pouvez définir certaines pièces comme étant rigides ou flexibles et ainsi réaliser des analyses de structure détaillées prenant en compte les effets présents dans des matériaux non-linéaires. Vous pouvez par exemple utiliser le module Multibody Dynamics pour calculer les efforts aux liaisons entre les pièces rigides ainsi que les contraintes générées dans les composants flexibles.