Structural Mechanics Module Updates
For users of the Structural Mechanics Module, COMSOL Multiphysics® version 5.6 includes dynamic contact analysis, built-in functionality for modeling cracks, and new methods for analyzing mechanical wear. Learn about these and many other Structural Mechanics updates below.
Dynamic Contact
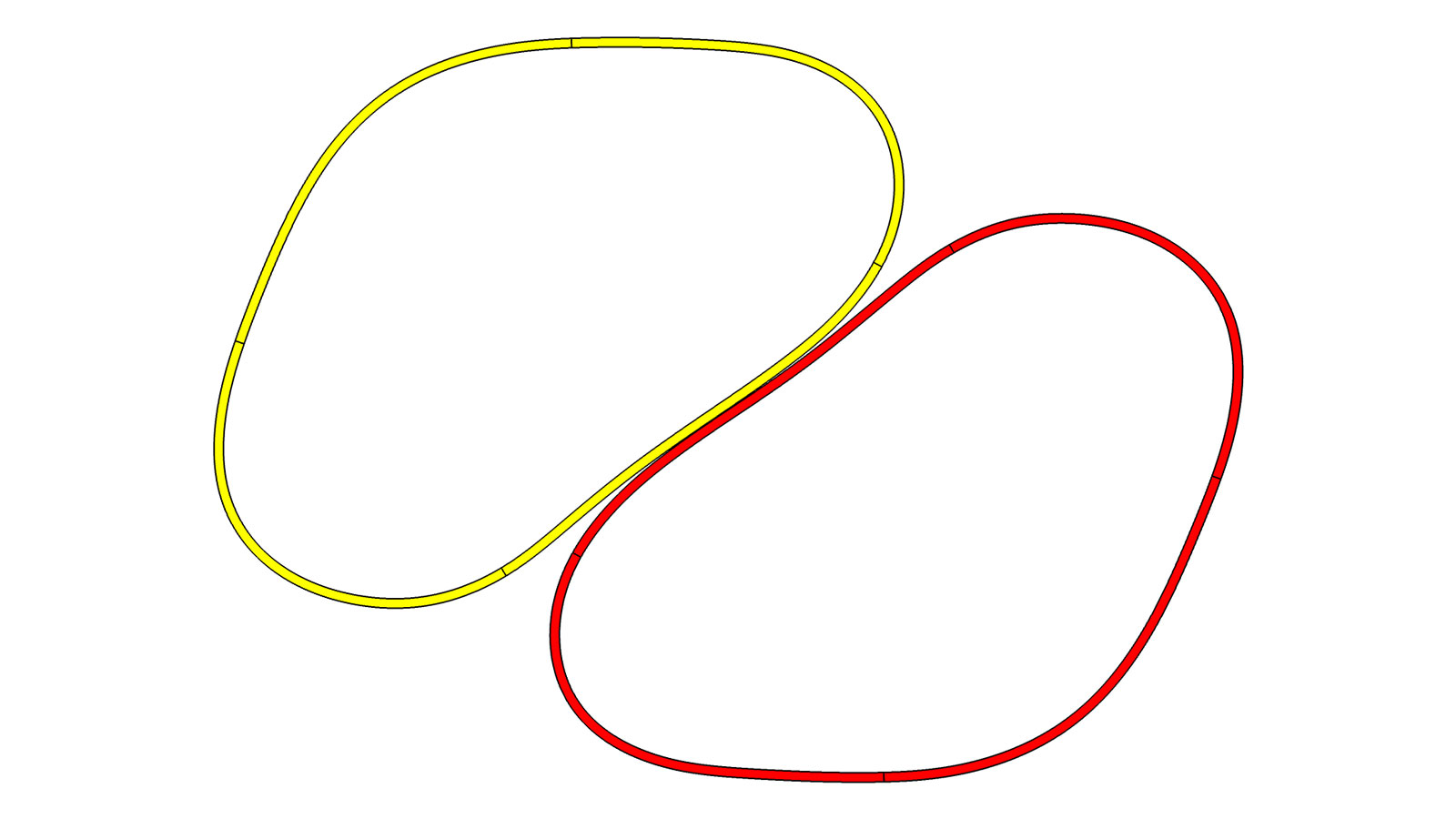
New algorithms for dynamic contact provide a significant improvement of the conservation of momentum and energy during transient contact events. This means that you can accurately model transient contact problems with significantly larger time steps than in previous versions. The new methods are accessed by selecting either the Penalty, dynamic or Augmented Lagrangian, dynamic formulation in the Contact node. You can see this functionality in the new Impact Between Two Soft Rings and Impact Analysis of a Golf Ball tutorial models.
Modeling of Cracks
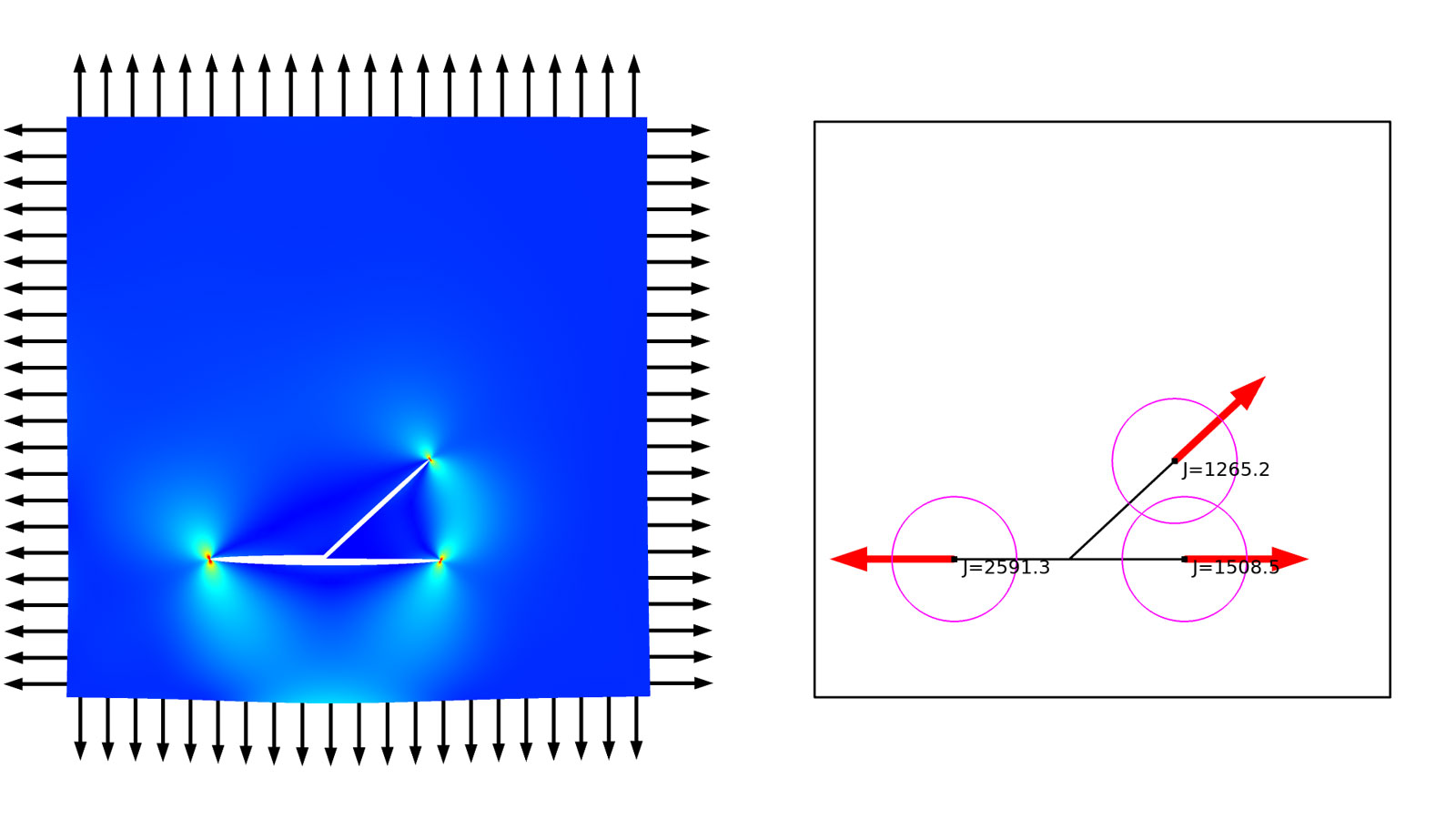
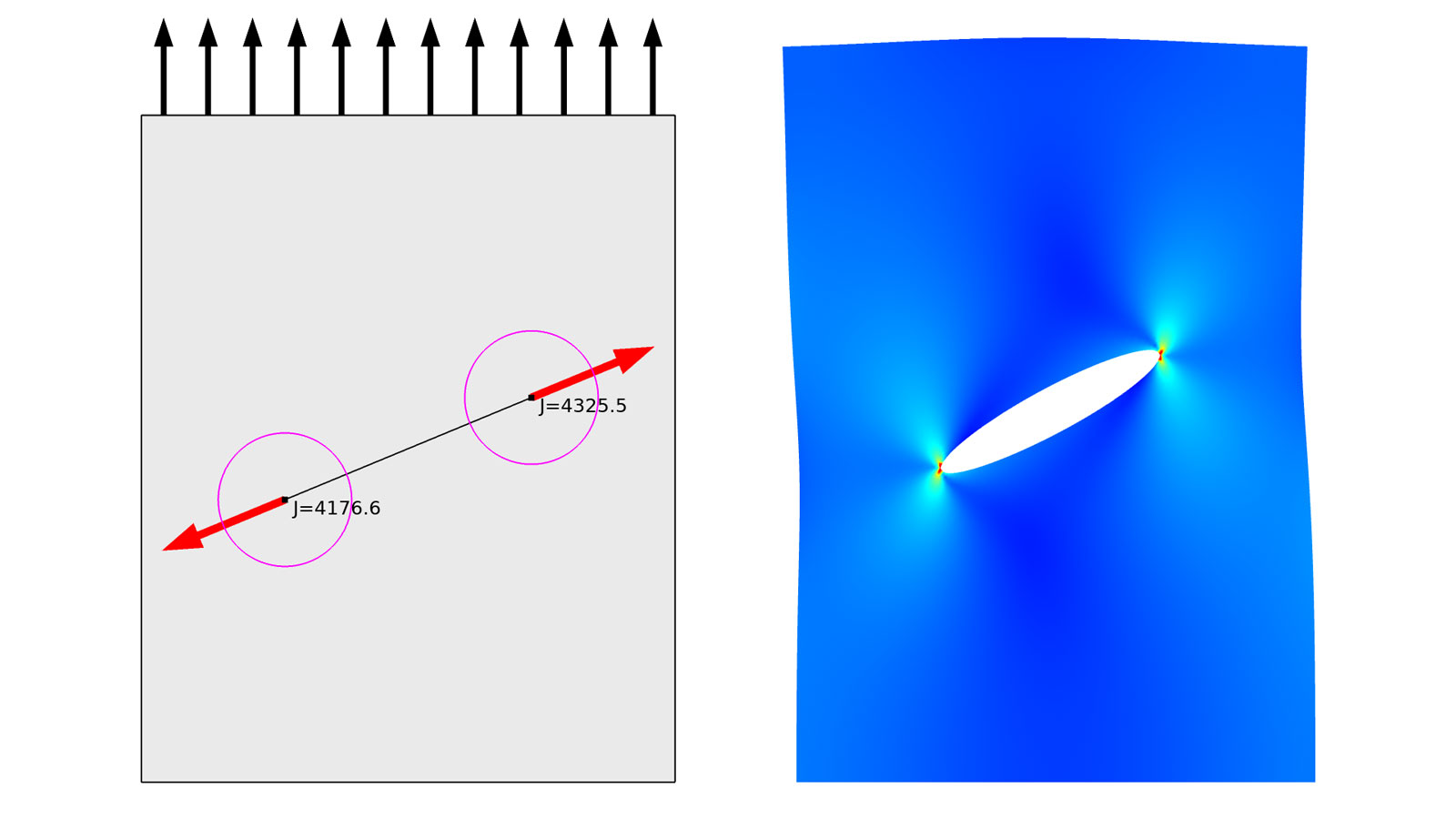
The new Crack node, available in the Solid Mechanics interface, can be used for different types of fracture mechanics simulations. When applied to an internal boundary, the two sides become disconnected. A crack can either be ideal or modeled with separate faces in the geometry. Through the addition of the J-integral subnode, you can compute J-integrals and stress intensity factors in 2D, 2D axisymmetry, and 3D. A special Face Load subnode is available for prescribing a load on the crack faces. You can see this new feature in the following models:
- angle_crack_plate (new model)
- surface_cracked_cylinder (new model)
- single_edge_crack
Simulation of Wear
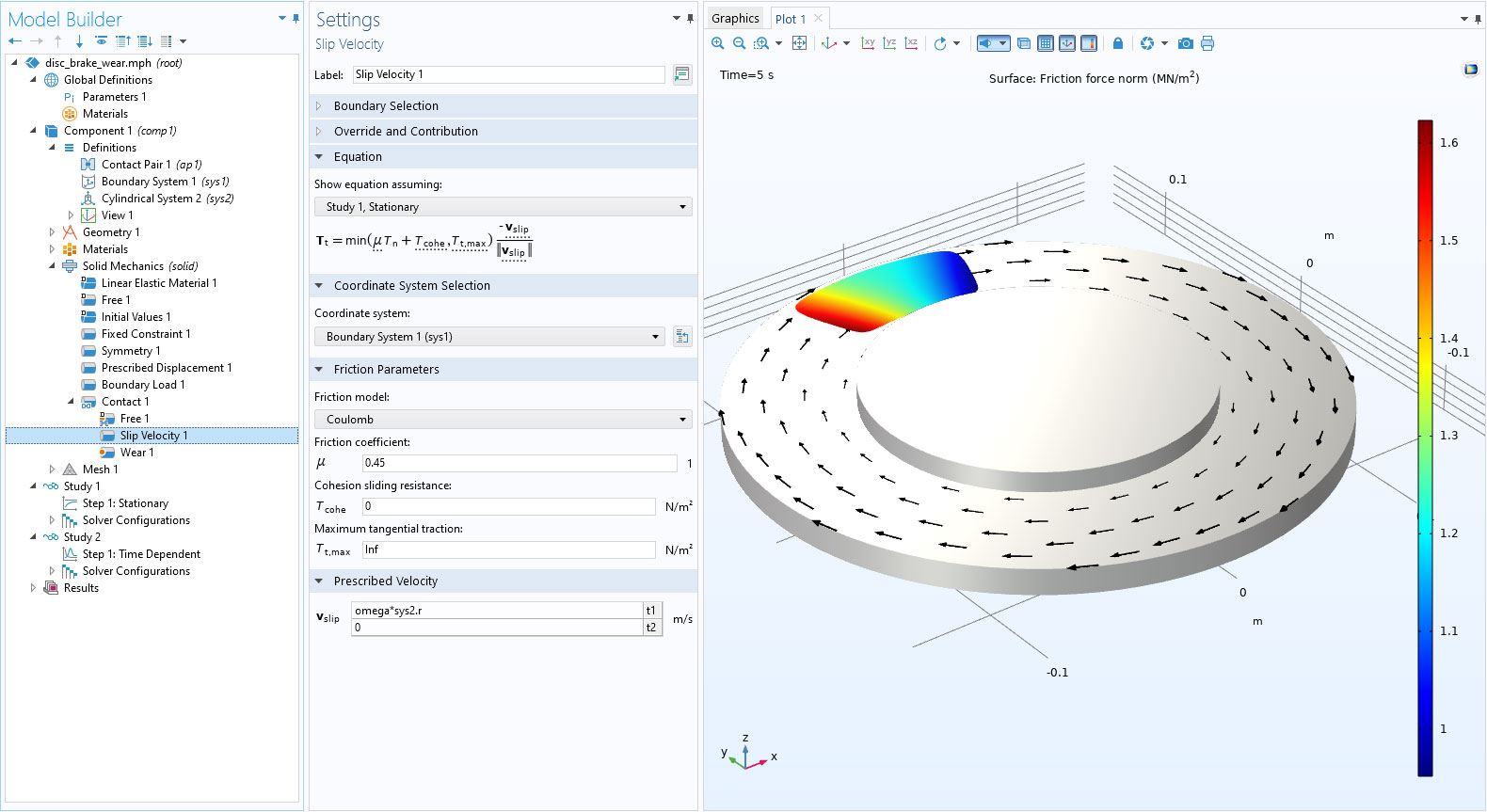
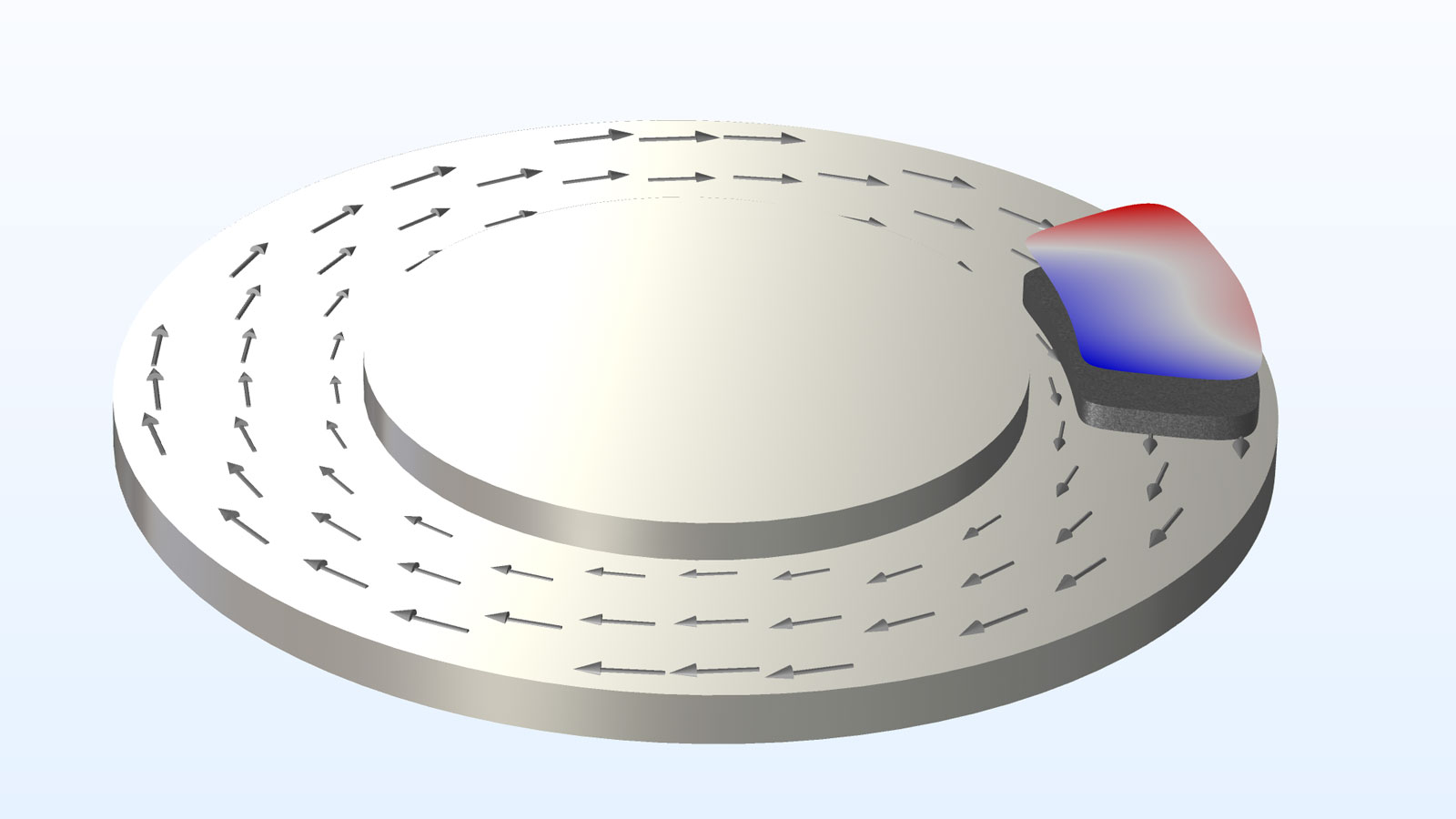
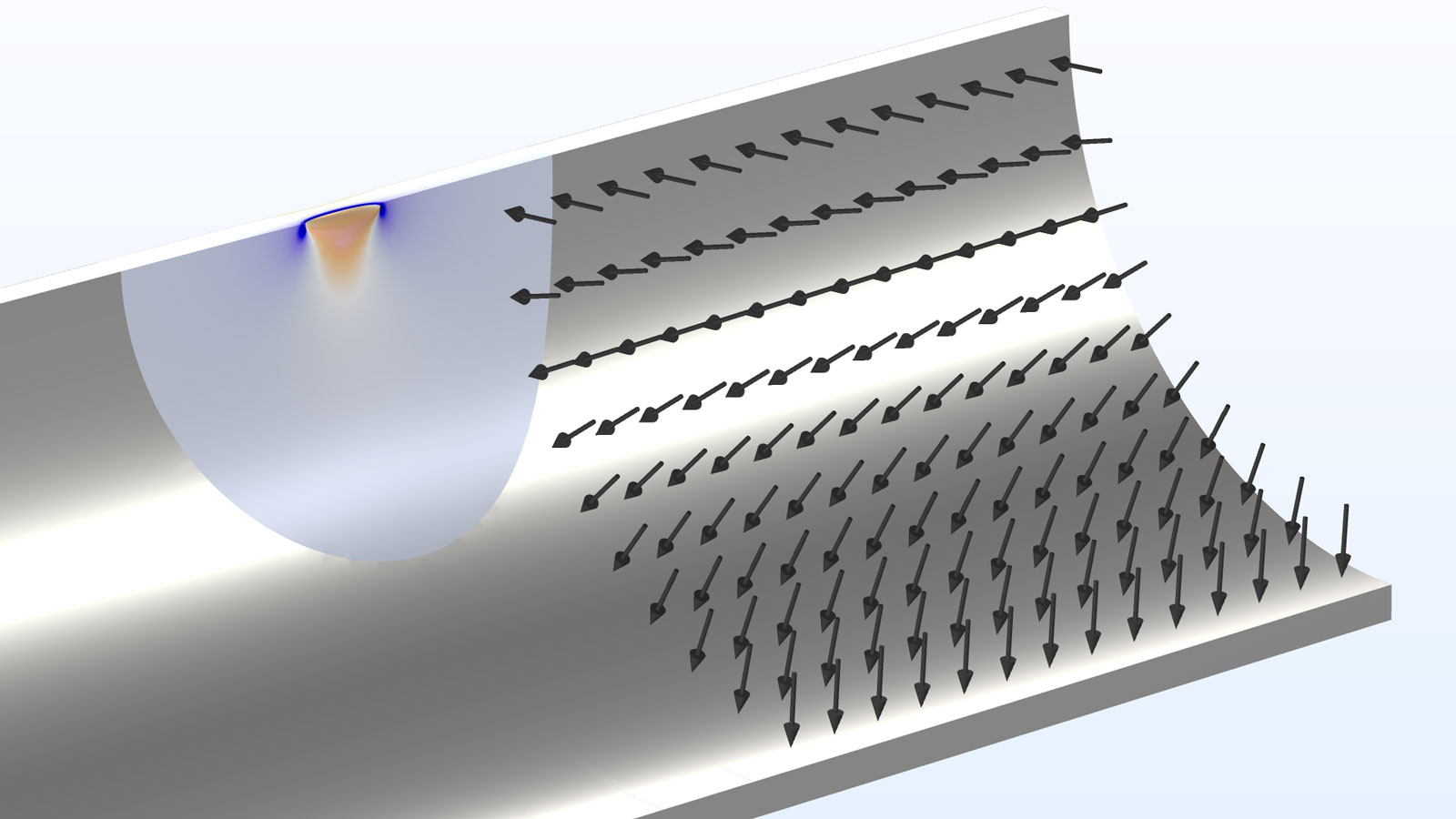
Methods for modeling mechanical wear have been added in the form of a new Wear node, a subnode under Contact, available in the Solid Mechanics and Multibody Dynamics interfaces. The wear rate is based on a generalized Archard equation. There are two algorithms for wear modeling. For general wear, and arbitrary geometry changes due to the wear, a deformed geometry approach is used. There is also a simplified approach in which the wear is incorporated into the offset in the contact gap. You can see the Wear feature in the new Disc Brake Pad Wear tutorial model.
Development of wear in a disc brake pad (the velocity arrows are just for visualization purposes).
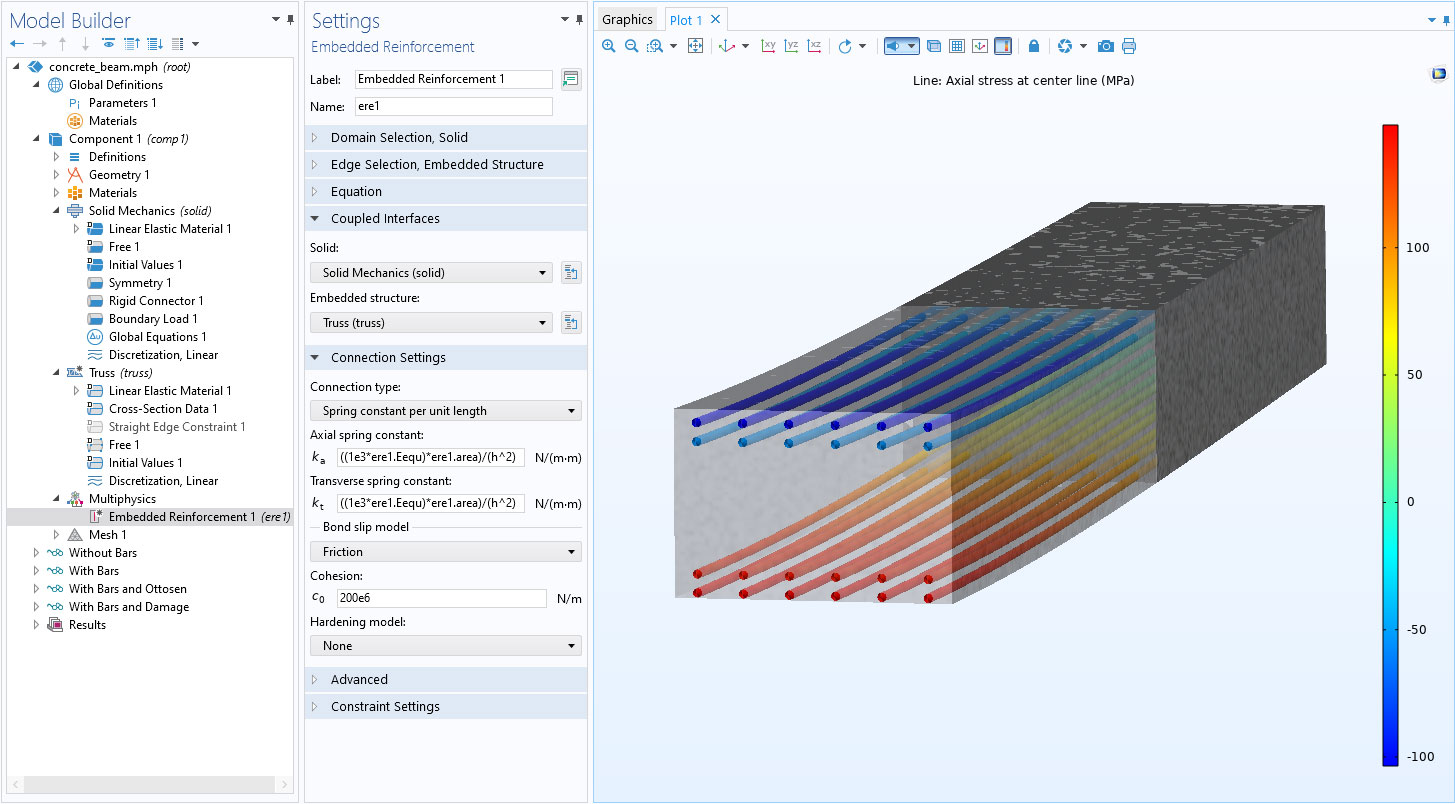
Embedded Reinforcements
A new Embedded Reinforcement multiphysics coupling enables you to insert edge elements from the Truss or Beam interfaces, and surface elements from the Membrane interface, into a domain modeled with Solid Mechanics. The mesh in the lower-dimensional interface is independent from the domain mesh. The purpose is to model structures like embedded reinforcements and sensors, for example. The connection can either be fully rigid or flexible. You can also model debonding between the embedded element and the surrounding solid. You can see this new coupling in the updated Concrete Beam with Reinforcement Bars tutorial model.
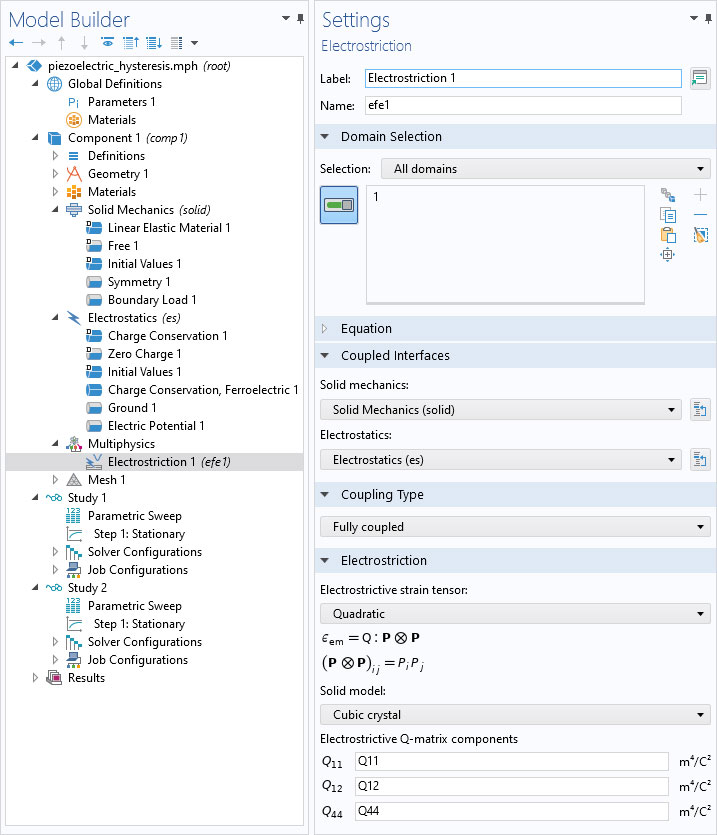
Electrostriction Multiphysics Interface
With the new Electrostriction multiphysics interface, you can model electrostriction phenomena, that is, a situation where a strain proportional to the square of the polarization is induced by an electric field. This interface will add Solid Mechanics and Electrostatics interfaces, together with the new Electrostriction multiphysics coupling. In Electrostatics, the standard Charge Conservation material model is used. Note that the AC/DC Module is needed to use this functionality.
{kind=link}
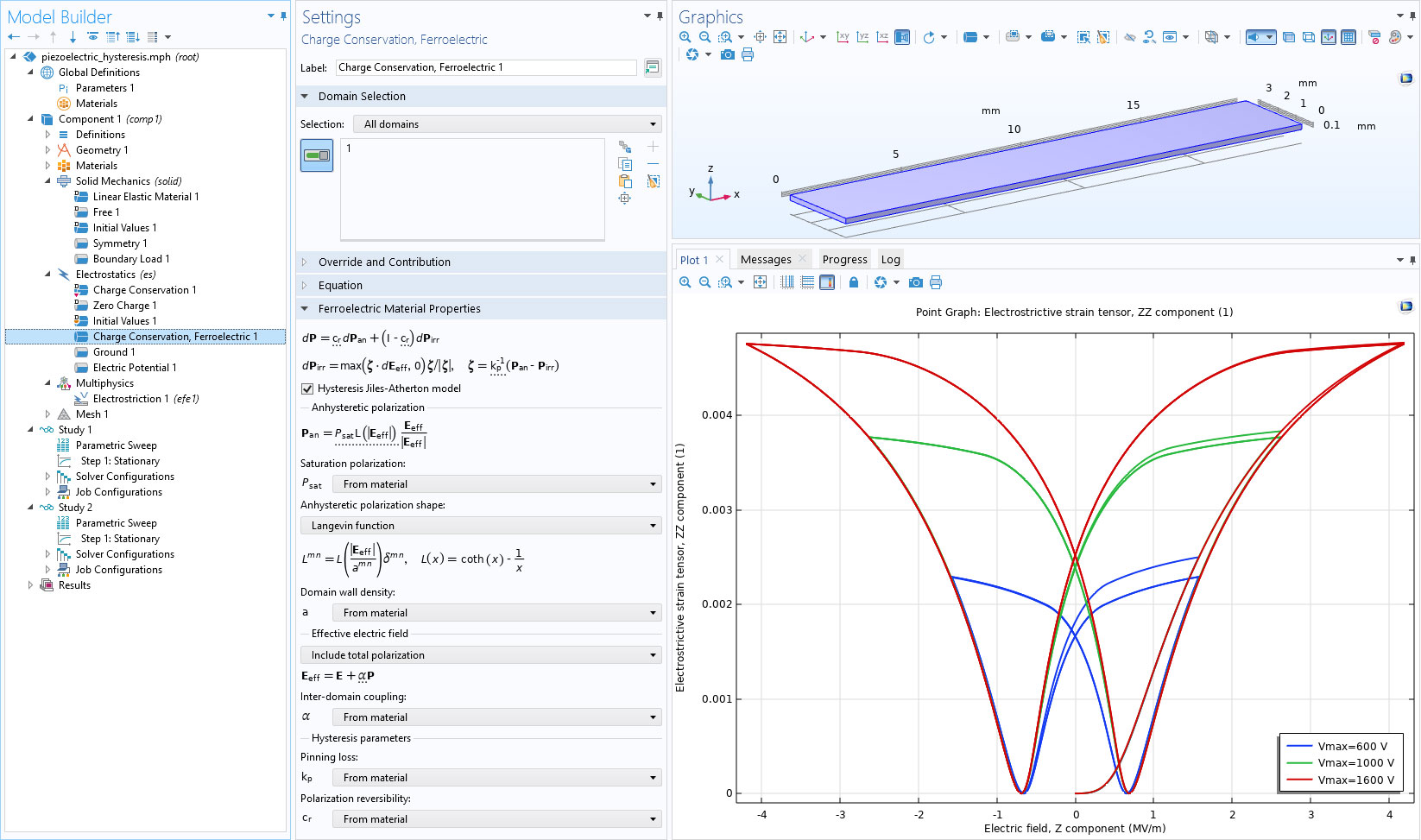
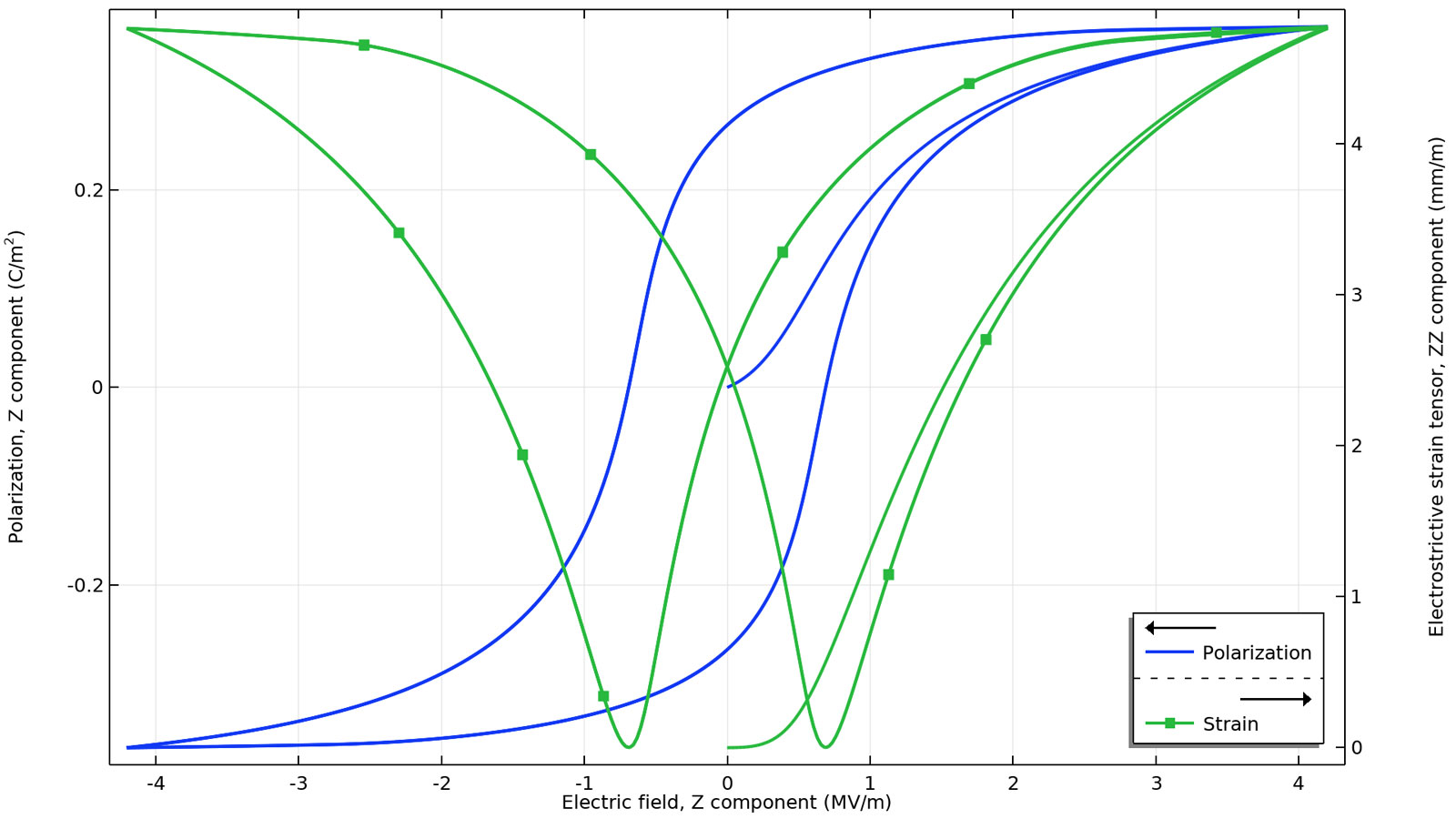
Ferroelectroelasticity Multiphysics Interface
A new Ferroelectroelasticity multiphysics interface is intended for analysis of ferroelectric materials exhibiting nonlinear piezoelectric properties. This multiphysics interface will add Solid Mechanics and Electrostatics interfaces, together with the new Electrostriction multiphysics coupling. In Electrostatics, the new Charge Conservation, Ferroelectric material model is used to simulate, for example, hysteresis using a Jiles–Atherton model. You can see this interface used in the new Hysteresis in Piezoelectric Ceramics tutorial model. Note that the AC/DC Module is needed to use this functionality.
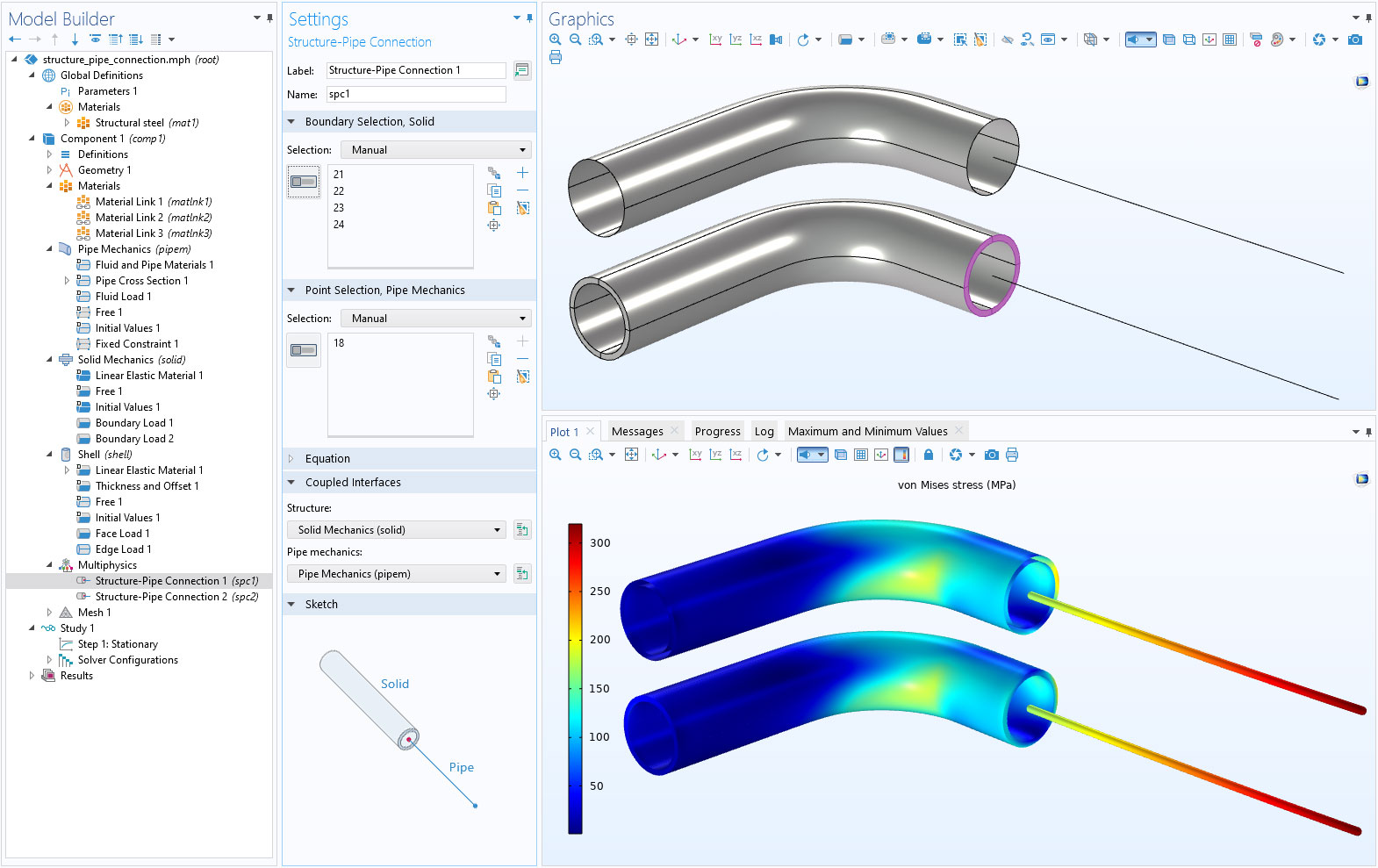
Transition Multiphysics Couplings for Pipe Mechanics
A new Structure-Pipe Connection multiphysics coupling has been added for facilitating transitions from the Pipe Mechanics interface to the Shell and Solid Mechanics interfaces. The purpose is to switch between the line representation in the Pipe Mechanics interfaces to a more accurate 3D representation where there are transitions in the pipe geometry.
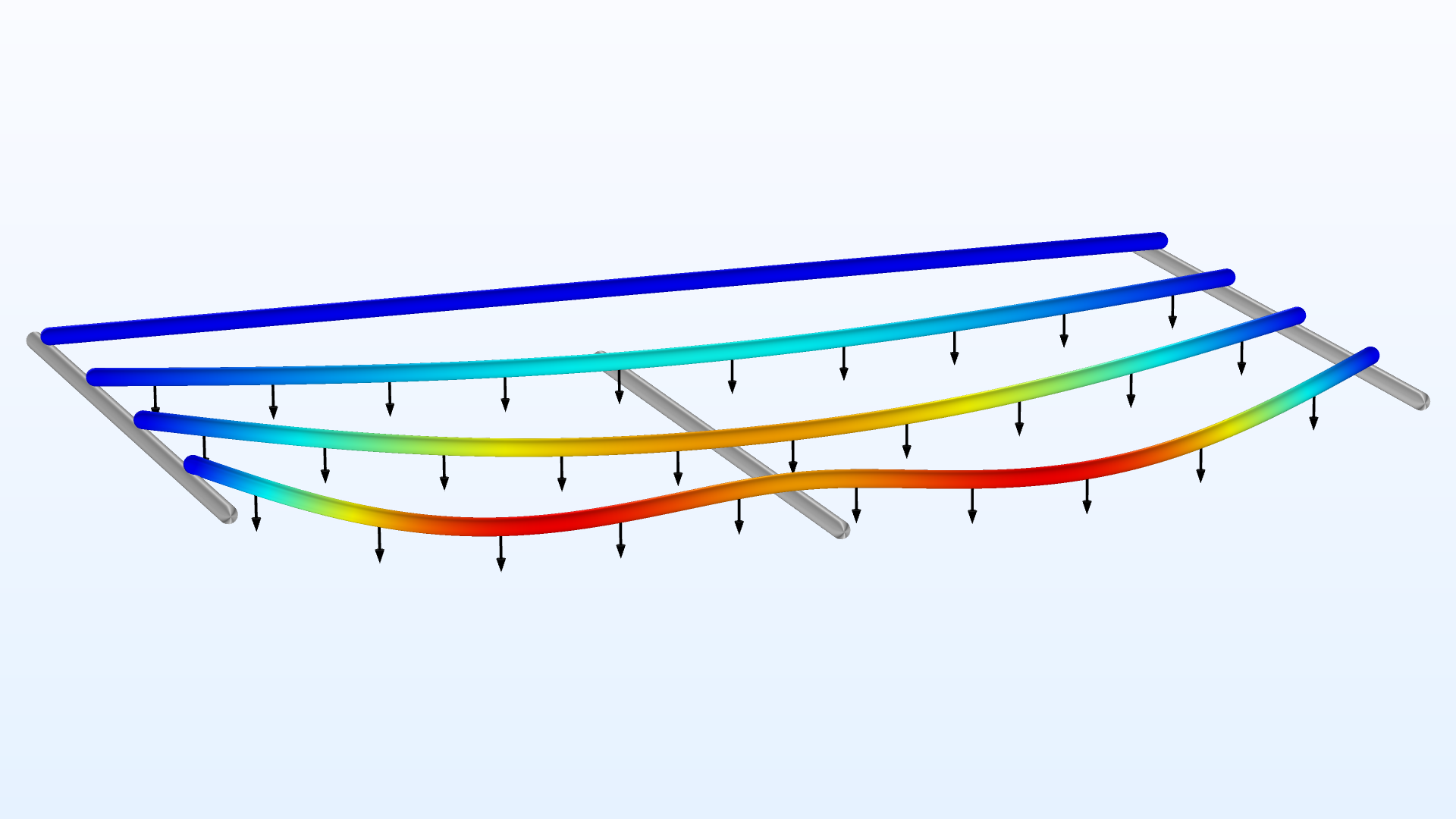
Unidirectional Constraints for Beams and Pipes
In the Beam and Pipe Mechanics interfaces, the Prescribed Displacement/Rotation node has been augmented with an option called Limited Displacement. When this option is selected, you can define an upper and lower limit for the displacement. In particular, this facilitates the modeling of beams resting on unidirectional supports.
This option is available for constraints on points, as well as for constraints on edges.
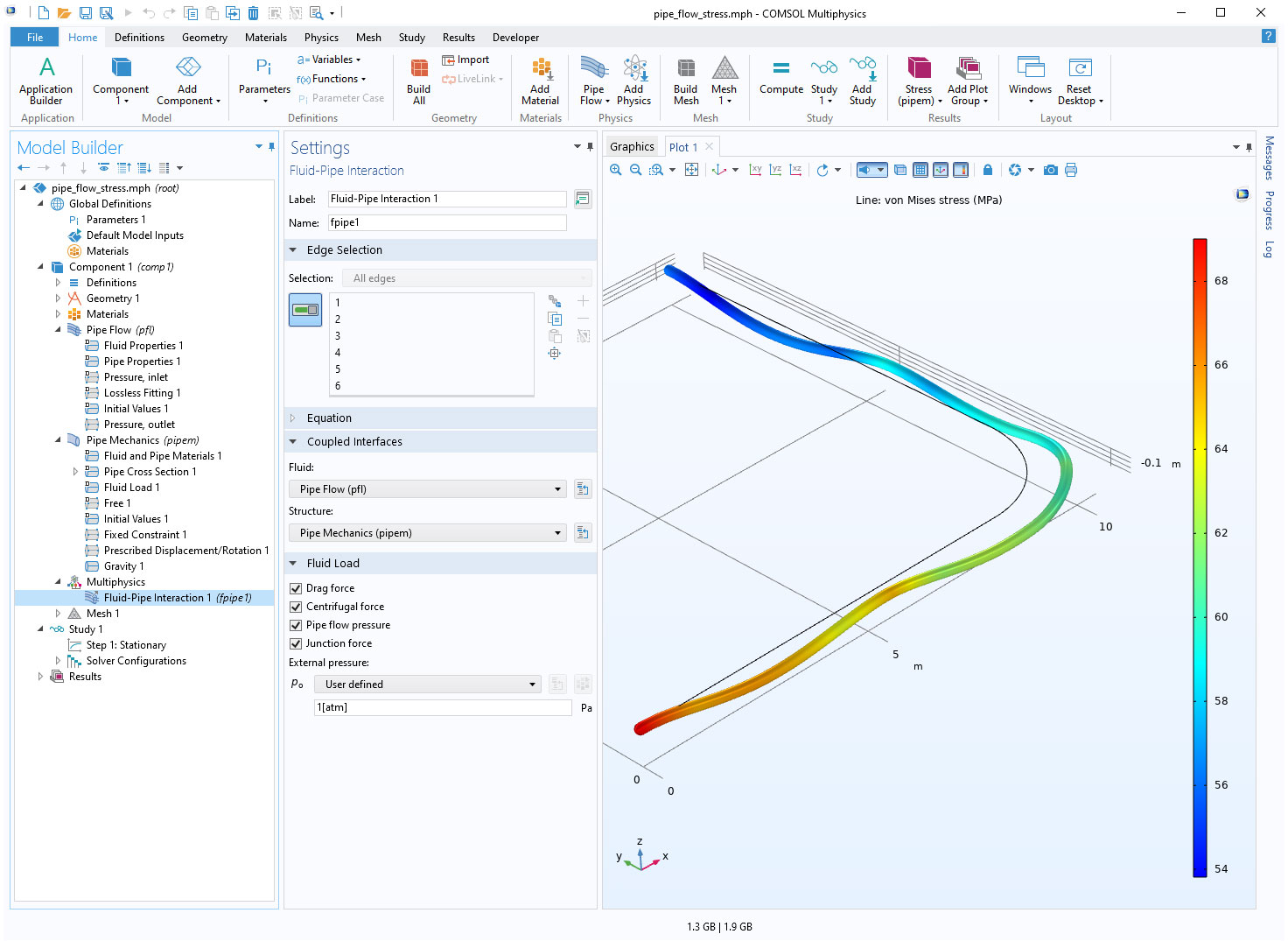
Fluid-Pipe Interaction, Fixed Geometry Multiphysics Interface
The new Fluid-Pipe Interaction, Fixed Geometry interface can be used to account for the fluid load's effect on the structural analysis when modeling fluid-structure interaction (FSI). The new Fluid-Pipe Interaction multiphysics coupling connects the Pipe Flow and Pipe Mechanics interfaces. Internal pressure, drag forces, loads on bends, and loads on junctions are all taken into account for more accurate FSI simulations. You can see the new interface demonstrated in the Coupled Analysis of Flow and Stress in a Pipe model.
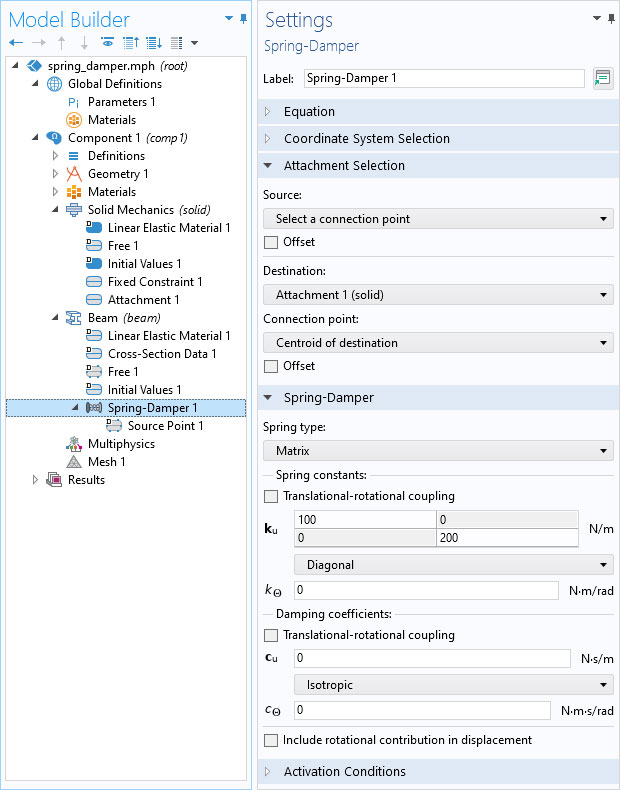
Springs and Dampers Connecting Points
In all structural mechanics interfaces, a new feature called Spring-Damper has been added to connect two points with a spring and/or damper. The points can be geometrical points, but they can also be abstract, for example, through the use of attachments or direct connections to rigid bodies. The spring can either be physical, with a force acting along the line between the two points, or described by a full matrix, connecting all translational and rotational degrees of freedom in the two points. The feature also makes it possible to connect a spring between points in two different physics interfaces.
{kind=link}
Port Boundary Condition for Elastic Wave Propagation
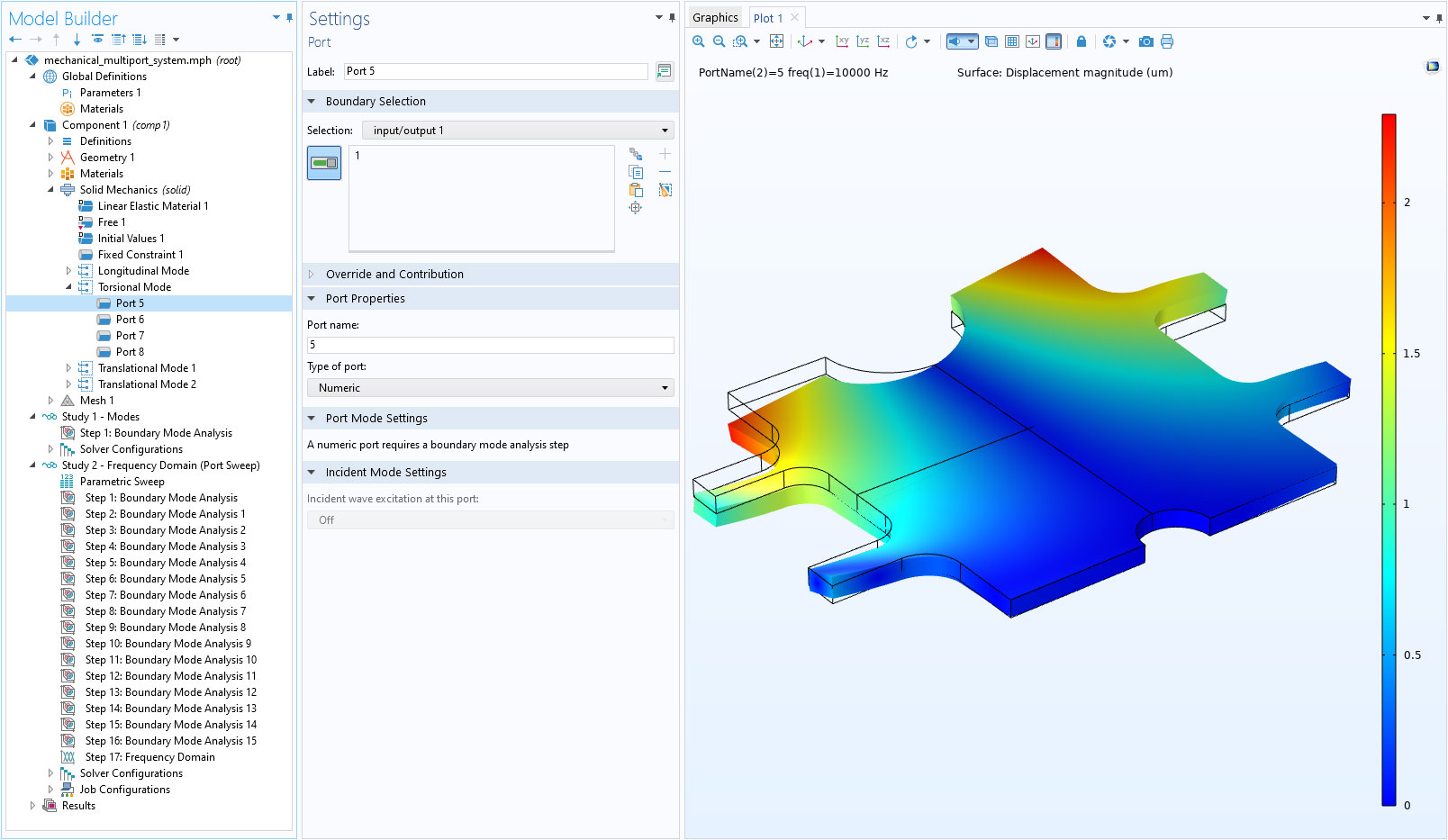
The new Port boundary condition, available with the Solid Mechanics interface, is designed to excite and absorb elastic waves that enter or leave solid waveguide structures. A given Port condition supports one specific propagating mode. Combining several Port conditions on the same boundary allows a consistent treatment of a mixture of propagating waves, for example, longitudinal, torsional, and transverse modes. The combined setup with several Port conditions provides a superior nonreflecting condition for waveguides to a perfectly matched layer (PML) configuration or the Low-Reflecting Boundary feature, for example. The port condition supports S-parameter (scattering parameter) calculation, but it can also be used as a source to just excite a system. The power of reflected and transmitted waves is available in postprocessing. To compute and identify the propagating modes, the Boundary Mode Analysis study is available in combination with the port conditions. You can view this functionality in the new Mechanical Multiport System: Elastic Wave Propagation in a Small Aluminum Plate tutorial model.
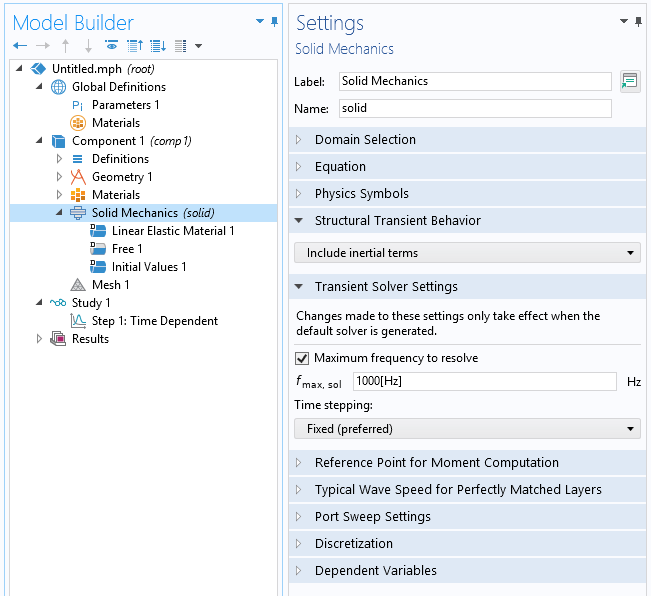
New Settings for Solving Transient Elastic Wave Problems with Solid Mechanics
New settings have been introduced in the Solid Mechanics interface that ensure a correct and efficient solver setup when solving elastic wave problems in the time domain. The settings are similar to the existing settings in the transient acoustics interfaces. In the Solid Mechanics interface node, a new Transient Solver Settings section has been introduced with an option to specify the Maximum frequency to resolve. This should be the maximum frequency content of the source's excitation or the maximum eigenmode frequency that can be excited. The automatically generated solver suggestion will have settings that use an appropriate solver method for wave propagation and ensure proper resolution in both time and space.
{kind=link}
Rigid Connector Improvements
The Rigid Connector features have multiple improvements. In the Shell and Beam interfaces, the selection alternatives have been extended to the top level, that is, boundaries and edges, respectively. When the center of rotation is defined by a point selection, the point no longer has to be part of the physics interface itself. You can couple rigid connectors from different physics interfaces, thus defining a new type of virtual rigid object (this selection resides in the Advanced section of the settings for the rigid connector). In the Solid Mechanics, Shell, and Beam interfaces, you can automatically generate rigid connectors from RBE2 elements in an imported file in the NASTRAN® format. This is controlled from a section named Automatic Modeling in the settings for these interfaces. Rigid connectors can belong to several physics interfaces, in order to mimic the connections in the imported file.
Friction with a Known Sliding Velocity
In some applications, the direction of the friction force is known, because two objects are sliding on each other with a given relative velocity. In this case, it is not necessary to solve for the friction forces, which can significantly speed up the solution. The new Slip Velocity feature, added as a subnode under the Contact node, can be used for these cases. The inputs for this node are similar to those of the Friction node. You can see this new feature in the new Disc Brake Pad Wear model.
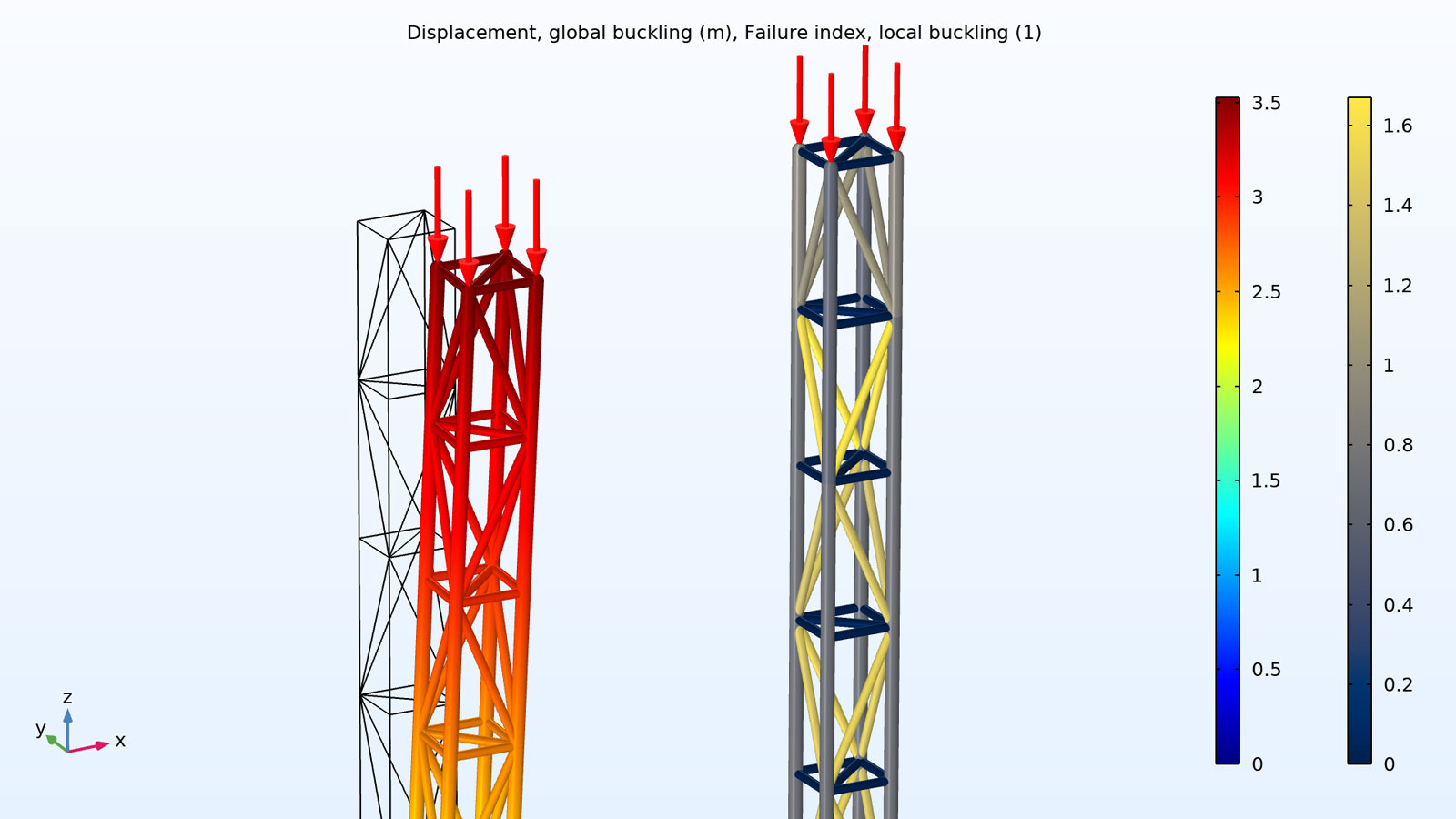
Evaluation of Local Buckling in Truss Structures
A set of variables have been added to represent the safety margin against local buckling in each member of a truss structure. You provide input data for evaluation in the new Local Buckling section of the Cross-Section Data node Settings window. This makes it possible to predict the risk of local buckling, even though each member is modeled only with a single truss element. If you were to perform a complete buckling analysis, each member would have to be modeled by a number of beam elements, having all rotational degrees of freedom disconnected in each joint.
New Option for Prescribing Rotating Frame Speed
In the Rotating Frame node in the Solid Mechanics and Multibody Dynamics interfaces, a new Rigid body option has been added. With this option, you enter a time-dependent torque around the axis of rotation, and the rotational velocity is computed by integration of the rigid body equation of motion.
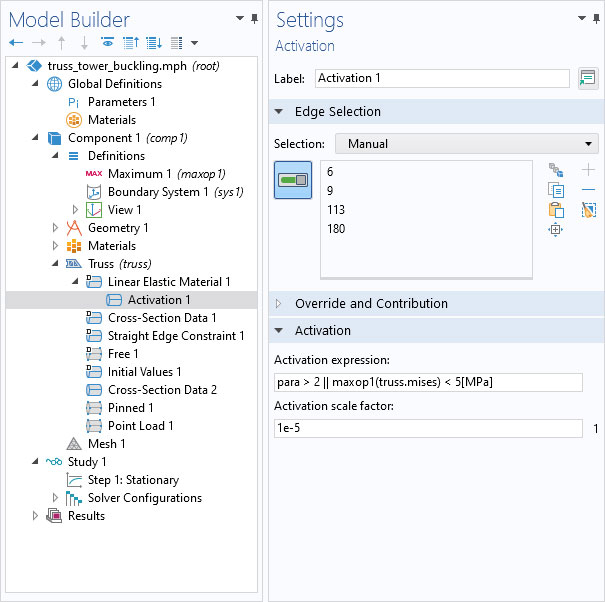
Activation of Material in the Truss Interface
The functionality for activation and deactivation of a material has been added to the Truss interface. The Activation subnode, under Linear Elastic Material, can be used to simulate construction processes where bars are added at different stages.
{kind=link}
Contact Improvements
In addition to the new dynamic contact and wear functionality, there are several other improvements in the field of contact mechanics. You can use a fully coupled solver together with the augmented Lagrangian contact algorithm, making it easier to set up solver sequences and improving stability and convergence for some problems. Also, in the Friction subnode under Contact, you can select User defined as the Friction model to directly enter an expression for the tangential force that causes sliding in terms of any other variables. Lastly, there are several new ways of providing penalty factors, both for the penalty method and for the augmented Lagrangian method.
{kind=link}
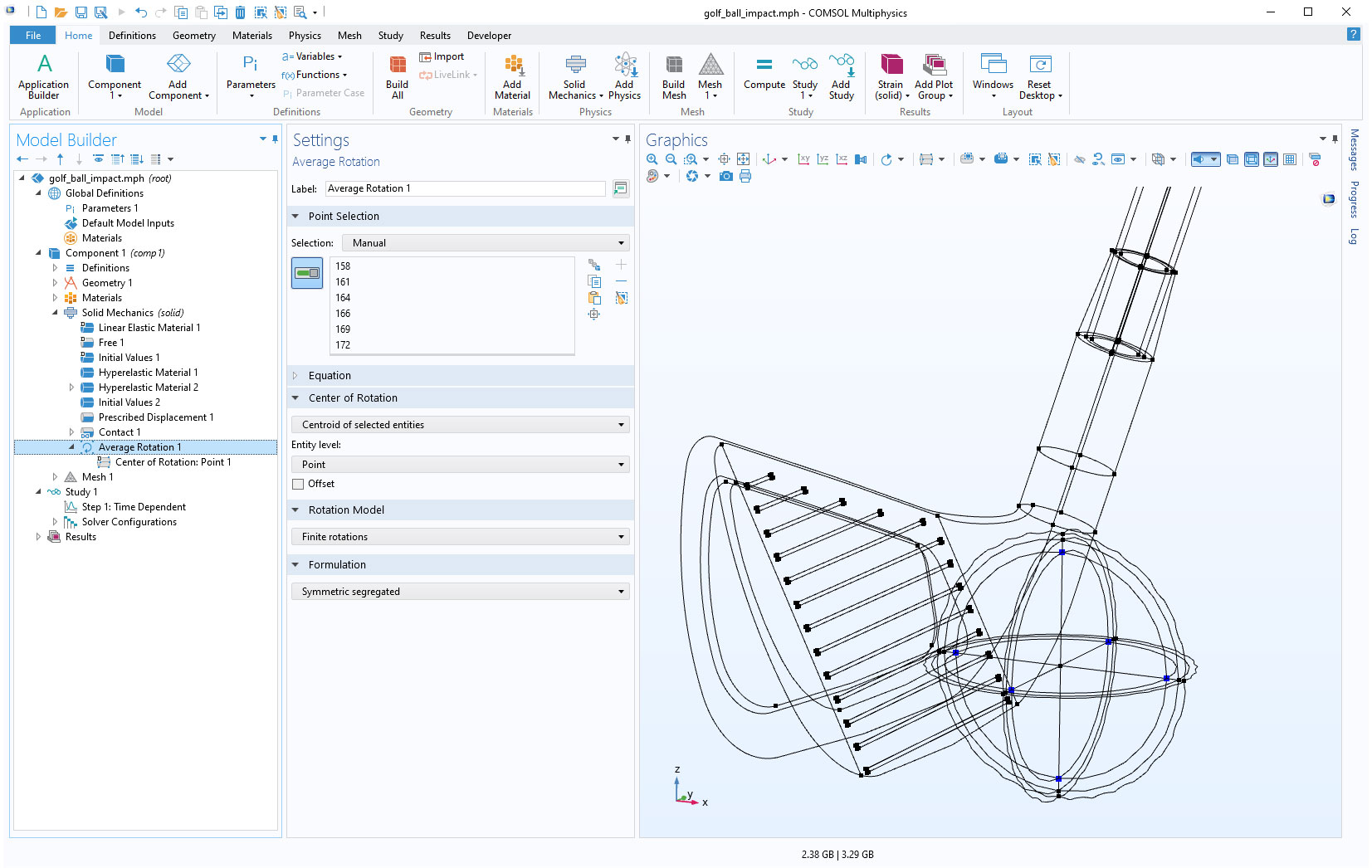
Computing Rotation from Displacements
In physics interfaces that have displacements as degrees of freedom, it is sometimes necessary to study the rotation of a region. To do that, you can add the new Average Rotation node, which uses the displacements of a set of points to generate variables representing the rotation. If more than three points are given, a least squares scheme is applied to make the best approximation of a rigid body rotation for the entire set of points. Additionally, angular velocities and accelerations can be computed. You can view this new feature in the new Impact Analysis of a Golf Ball and updated Sensitivity Analysis of a Truss Tower tutorial models.
Direct Input of Section Stiffness in Beams
A new material model, Section Stiffness, has been introduced in the Beam interface. Here, you directly enter data such as axial stiffness, bending stiffness, etc. The purpose of this material model is to facilitate modeling of complex beam cross sections, where the stiffness properties cannot be deduced from a single elastic material, and the geometrical properties of the cross section, as is the case for composite beams.
{kind=link}
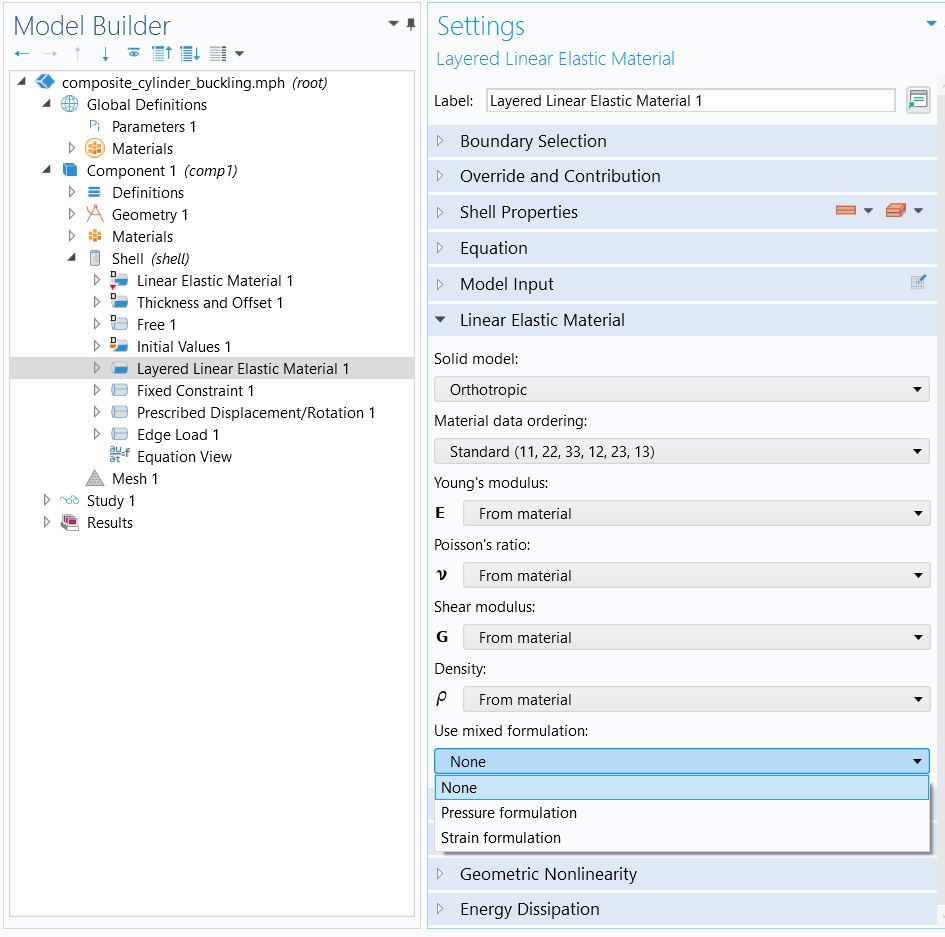
Mixed Formulation in Layered Linear Elastic Material
For the Layered Linear Elastic Material node, in the Shell interface, support for using a mixed formulation has been added. The mixed formulation supports both Pressure formulation and Strain formulation. It can be used to improve accuracy for materials with low compressibility.
The mixed formulation in a single-layer shell is available with the Structural Mechanics Module. If the Composite Materials Module is available, the mixed formulation can also be used in multilayered shells.
{kind=link}
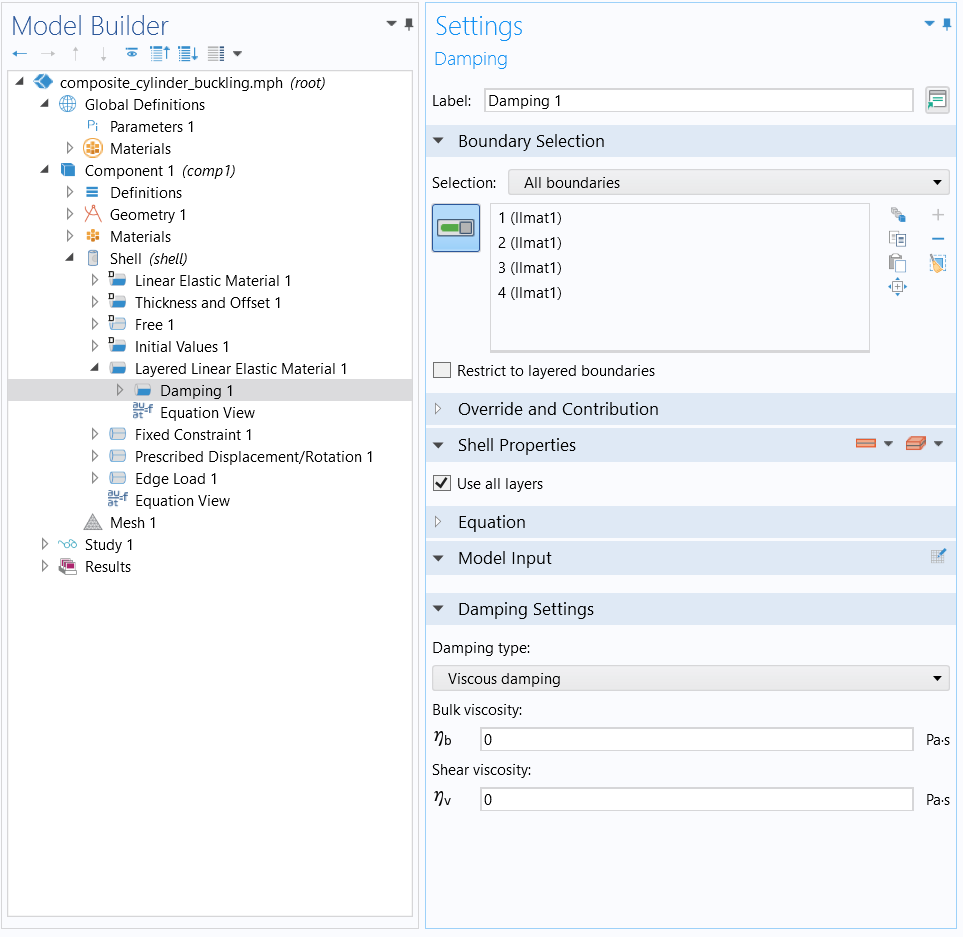
Viscous Damping in Layered Linear Elastic Material
Viscous damping can now be added to the Damping subnode under Layered Linear Elastic Material in the Shell interface.
The viscous damping for a single-layer shell is available with the Structural Mechanics Module. If the Composite Materials Module is available, the viscous damping can also be used in multilayered shells, and the individual layers can have different damping values.
{kind=link}
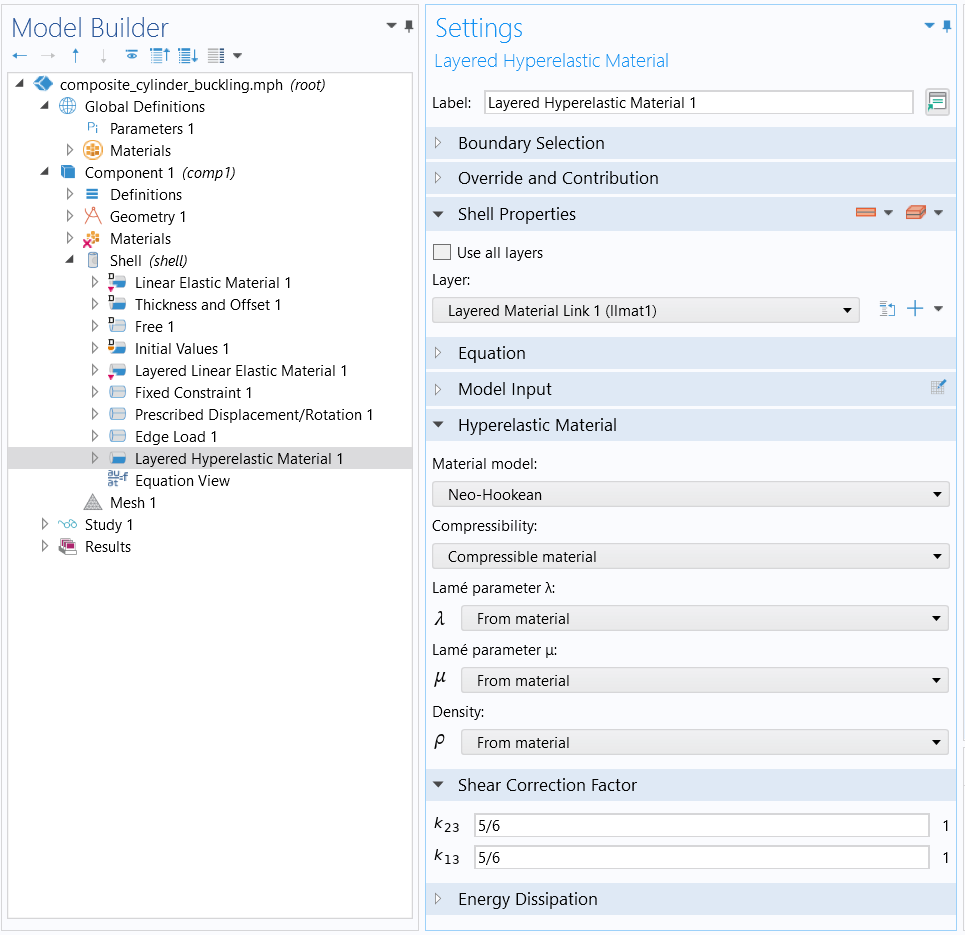
Layered Hyperelastic Material in Shell Interface
All of the Hyperelastic Material models available in the Solid Mechanics interface are now available for the Layered Hyperelastic Material node in the Shell interface. If the Composite Materials Module is available, the material models can also be used in multilayered shells, and the individual layers can have different material models.
{kind=link}
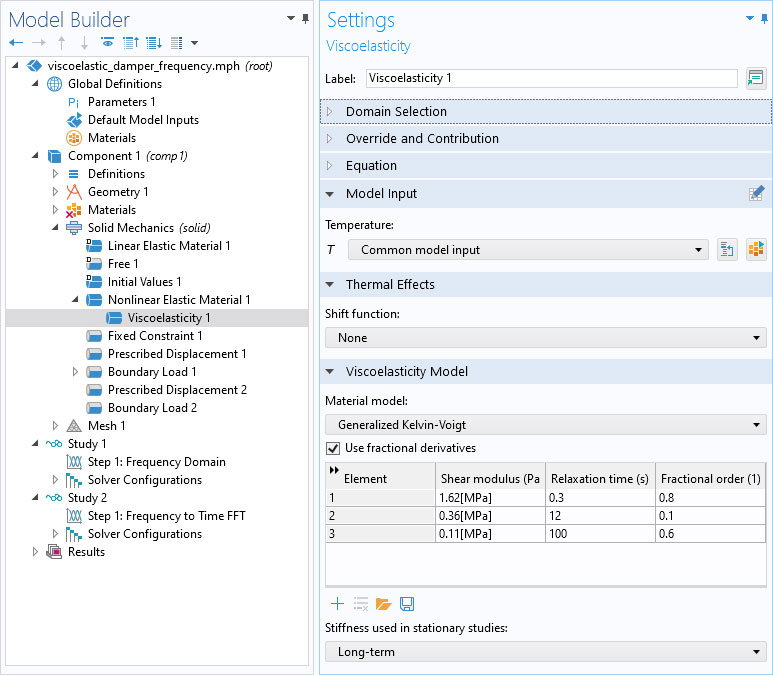
Viscoelasticity Improvements
Two new viscoelasticity models have been added: Maxwell and Generalized Kelvin-Voigt. The Maxwell material can be considered as a type of liquid, since its long-term deformation under a constant stress is unbounded. The Generalized Kelvin-Voigt model has a Prony series representation with several time constants. Conceptually, it consists of a set of Kelvin elements (spring and dashpot elements in parallel) connected in series.
For frequency-domain analyses, all of the viscoelasticity models (Generalized Maxwell, Generalized Kelvin-Voigt, Maxwell, Kelvin-Voigt, Standard Linear Solid, and Burgers) have been augmented by a fractional derivative representation. Using a fractional time derivative representation makes it easier to fit material data to experiments for some materials. For time-domain analyses using the Generalized Maxwell and Standard Linear Solid viscoelastic models, performance has been improved by up to one order of magnitude.
The Tool–Narayanaswamy–Moynihan shift function is commonly used to describe the glass transition temperature in glasses and polymers. It has been added to the set of shift functions in the Viscoelasticity node.
{kind=link}
New Tutorial Models
COMSOL Multiphysics® version 5.6 brings several new tutorial models to the Structural Mechanics Module.
Disc Brake Pad Wear
Application Library Title:
disc_brake_wear
Impact Between Two Soft Rings
Application Library Title:
ring_impact
Angle Crack Embedded in a Plate
Application Library Title:
angle_crack_plate
Surface Cracked Cylinder
Application Library Title:
surface_cracked_cylinder
Mechanical Multiport System: Elastic Wave Propagation in a Small Aluminum Plate
Application Library Title:
mechanical_multiport_system
Hysteresis in Piezoelectric Ceramics
Application Library Title:
piezoelectric_hysteresis
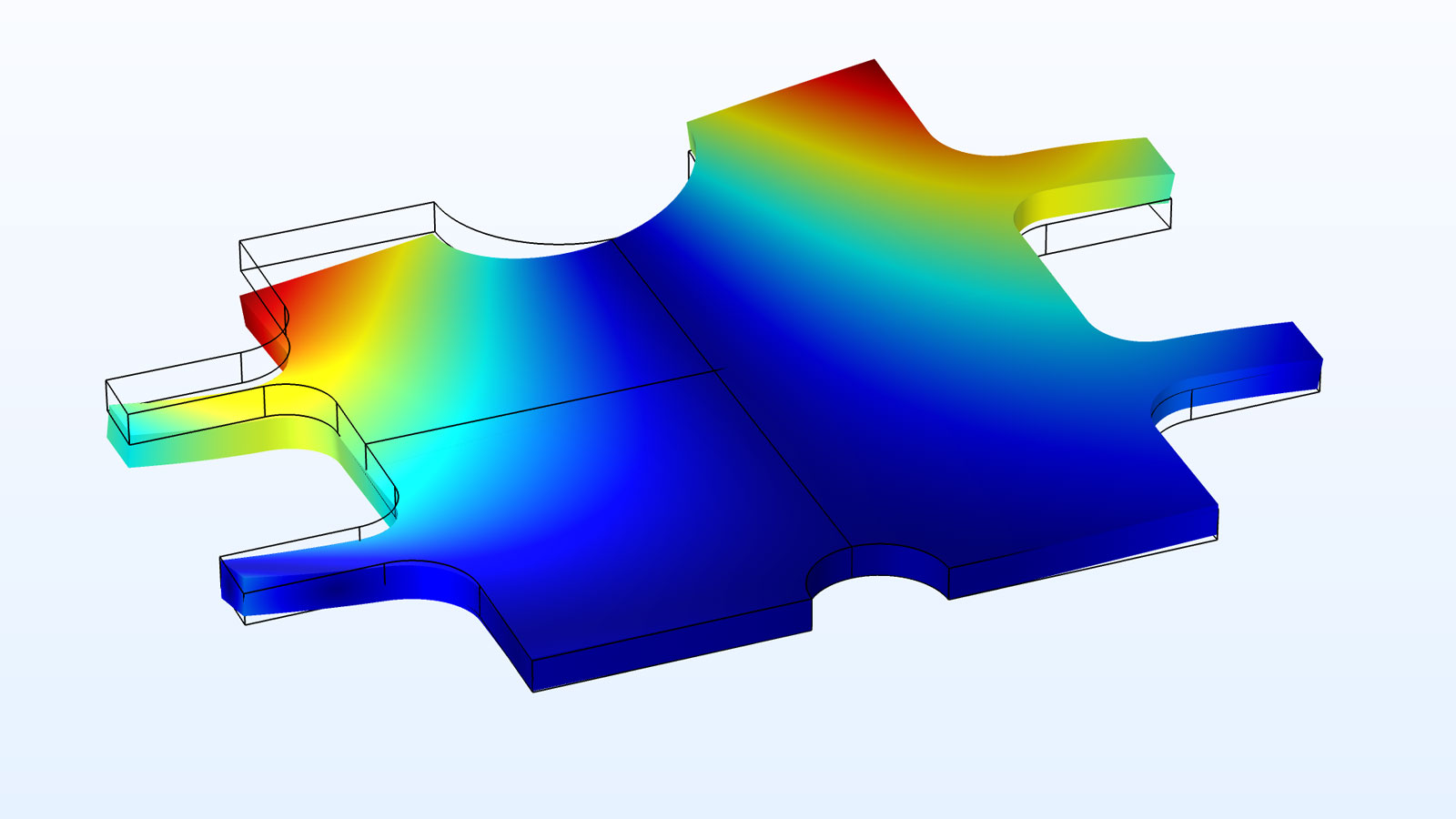
Bracket — General Periodic Dynamic Analysis
Application Library Title:
bracket_general_periodic