Actuation Technique for Miniature Robots Developed using Multiphysics Simulation
P. Lazarou, C. RotinatCEA LIST, France
Robotic devices for minimally invasive surgery procedures require flexible tools and careful actuation. But most robotic surgery devices are bulky, expensive, and physically draining for surgeons to operate for long periods of time. At the French Atomic and Alternative Energies Commission (CEA LIST), researchers are investigating miniature phase-change actuators that will reduce the strain placed on surgeons during long procedures. Using COMSOL Multiphysics, Christine Rotinat and Panagiotis Lazarou have simulated a phase-change microactuator that can deliver high loads and ranges of movement that are safe for both patient and surgeon. Their design is based on one by Goldschmidbӧing et al. and relies on the volume expansion of a conductive paraffin composite. They used their simulation of the coupled physics–including nonlinear electrical conductivity, changing viscosity, density, and specific heat capacity–to optimize their design for the best actuation and electrical consumption. Eventually, their microactuator will be integrated into a robotic surgical tool used in the operating room.
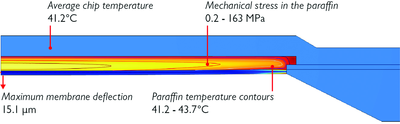 Simulation results showing temperature, stress, and deflection in the microactuator components during the paraffin phase change.
Simulation results showing temperature, stress, and deflection in the microactuator components during the paraffin phase change.
Téléchargement
- CEA_LIST_CN2014.pdf - 0.14MB