
Nous vivons dans un monde tridimensionnel, voire même quadrimensionnel si l’on considère l’espace-temps. Pour autant, dans le domaine de l’ingénierie, il est fréquent de faire appel à des approximations 2D afin de réduire les ressources nécessaires à la modélisation et au calcul. Dans ce billet de blog, nous verrons quand et comment il est possible d’utiliser des formulations 2D dans le cadre de problèmes de mécanique du solide.
Table des matières
- Qu’est-ce que la 2D?
- Les différentes formulations 2D en mécanique du solide
- Lois de comportement
- Quelle formulation dois-je choisir?
- Pourquoi les contraintes transverses apparaissent-elles?
- Qu’en est-il des contraintes dans le plan?
- Déformations inélastiques
- Remarques sur les contraintes équivalentes
- Remarques sur la mécanique de la rupture
- Théories 1D
Note de l’éditeur : Ce billet de blog a été mis à jour le 16 décembre 2022 pour refléter les nouvelles caractéristiques et fonctionnalités de la version 6.1 du logiciel COMSOL Multiphysics®.
Qu’est-ce que la 2D?
Dans le monde réel, on ne trouve pas grand-chose qui soit réellement bidimensionnel. Lorsqu’on étudie, par exemple, le champ électromagnétique autour de la section d’un câble en 2D, on suppose en réalité que : “Ce câble est droit et long. Suffisamment loin des extrémités, les champs ne dépendent que de la position dans ce plan de section transverse.” Pour la plupart des problèmes physiques, l’idée est la suivante: dans le cadre d’une approximation 2D, on considère uniquement la section transverse d’un objet long et droit, en ignorant les effets induits par les extrémités de l’objet.
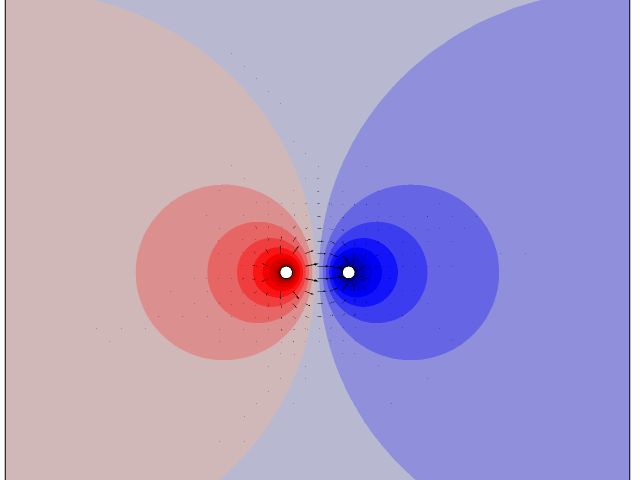
Le potentiel électrique (en couleur) et le champ électrique (flèches) obtenus par un calcul 2D, autour de deux longs câbles soumis à des potentiels différents.
La section transverse est représentative du cas où les câbles sont longs, droits et parallèles.
Pourquoi la mécanique du solide est-elle un cas particulier?
Dans le domaine de la mécanique du solide, on trouvera des états bidimensionnels possibles autres que la simple extrusion. On peut par exemple considérer une plaque mince et plane, sollicitée uniquement dans son plan, comme étant bidimensionnelle. Qu’y a-t-il donc de si particulier en mécanique du solide qui rende cela possible?
Considérons maintenant une analyse thermique de cette même plaque. Dans ce cas, la convection et le rayonnement opèrent sur toute l’étendue de la plaque et induisent un flux de chaleur hors du plan. Le gradient de température dans la direction de l’épaisseur devient alors significatif, ce qui rend plus difficile l’utilisation d’une approximation 2D pour le transfert de chaleur. Un raisonnement similaire peut être appliqué à de nombreux autres phénomènes physiques.
En mécanique du solide, on retrouve également un effet dans la direction hors du plan. En général, la plaque mince sera déformée dans la direction transverse, et deviendra donc plus fine si on l’étire. Cela n’affectant pas directement la solution du problème 2D, le changement d’épaisseur est un résultat qui pourra au besoin être calculé a posteriori. Ce point sera abordé plus en détail ci-dessous.
Les différentes formulations 2D en mécanique du solide
Dans la section suivante, on supposera que “2D” désigne le plan xy et que z correspond à la direction hors du plan. Les déplacements dans le plan xy sont donnés par u et v respectivement, et w représente le déplacement selon la direction z.
Il convient de noter que toutes les formulations sont identiques lorsqu’il n’y aucun couplage entre les composantes dans le plan et celle hors du plan (par exemple, lorsque le coefficient de Poisson est nul pour un matériau élastique linéaire).
Déformations planes
L’état de déformations planes est, parmi les formulations 2D de la mécanique du solide, la seule formulation qui ne repose sur aucune approximation. Cet état existe par exemple dans un objet contraint dans la direction z entre deux parois rigides. C’est également la formulation qui, d’un point de vue conceptuel, correspond le plus aux formulations 2D utilisées dans d’autres domaines de la physique. L’objet ne doit cependant pas être « long » dans la direction z, ce qui est une différence fondamentale par rapport aux approximations 2D de la plupart des autres domaines de la physique.
Les hypothèses sont simples : aucun déplacement dans la direction z.
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
w&=&0
\end{array}}
{\ }
\]
Cela peut s’exprimer de manière équivalente en termes de déformations:
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
\varepsilon_{zz}&=&\varepsilon_{xz}&=&\varepsilon_{yz} &=& 0
\end{array}}
{\ }\]
On notera que pour éviter complètement les effets de bords, on suppose que les conditions aux limites au niveau des parois rigides sont des appuis plans, de sorte que le déplacement dans le plan xy n’est pas entravé. A défaut, on se retrouverait dans la situation où l’on étudie un objet long, loin de ses extrémités.
Contraintes planes
Dans le cadre d’une formulation en contraintes planes, on suppose que les trois composantes du tenseur des contraintes relatives à la direction z sont nulles. C’est une bonne approximation pour les plaques minces, mais elle n’est pleinement vraie que dans la limite où l’épaisseur s’approche de zéro.
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
\sigma_{z}&=& \sigma_{xz}&=&\sigma_{yz}&=& 0
\end{array}}
{\ }\]
Sur une surface libre, un état local de contraintes planes prévaut toujours, puisque cela correspond exactement à la condition limite. C’est pourquoi cette hypothèse fonctionne si bien : elle est exactement vraie sur les deux faces opposées de la plaque, et à condition que l’épaisseur soit faible, aucune contrainte significative dans la direction z ne se développera à l’intérieur.
Déformation plane généralisée
Hélas, il n’existe pas de définition unique de la formulation généralisée, mais cela signifie le plus souvent que certaines des hypothèses de la formulation classique sont relaxées. Supposons que le tenseur des déformations puisse être non nul, mais qu’il ne dépende toujours que de x et y. On peut alors montrer qu’un tel tenseur des déformations est obtenu à partir du champ de déplacement suivant:
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) – \frac{a}{2} z^2 \\
v&=&v \left ( x,y \right ) – \frac{b}{2} z^2 \\
w&=&\left (ax + by +c \right )z
\end{array}}
{\ }
\]
Ici, a, b, et c sont des constantes. Les déformations infinitésimales relatives à la direction hors du plan sont donc les suivantes:
{\begin{array}{*{10}{l}}
\varepsilon_{zz}&=&ax +by +c \\
\varepsilon_{xz}&=&\varepsilon_{yz}&=&0
\end{array}}
{\ }
\]
Dans le plan z = 0, sur lequel est défini l’analyse, le déplacement w vaut zéro. Il reste donc deux composantes du champ de déplacement à résoudre, u et v. Il y a toutefois trois nouvelles inconnues, que sont a, b, et c. Dans une interprétation courante des déformations planes généralisées, seul le coefficient c est utilisé. Physiquement, cela signifie que l’on autorise l’objet à s’allonger uniquement dans la direction z. En incluant les paramètres a et b, on autorise également l’objet à fléchir selon une courbure constante. Les valeurs des paramètres a, b, et c découlent de l’hypothèse selon laquelle aucune force axiale, ni aucun moment de flexion n’agissent sur la section transverse, c’est-à-dire que les extrémités sont libres.
Lorsque vous sélectionnez l’option de déformation plane généralisée dans COMSOL Multiphysics®, vous avez la possibilité d’inclure ou non la flexion hors du plan.
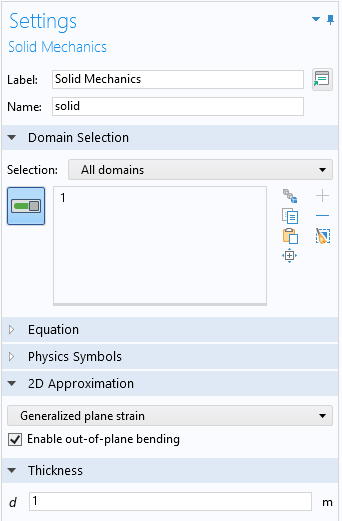
Sélection de la déformation plane généralisée.
Il existe par ailleurs d’autres formulations qui sont parfois appelées “déformation plane généralisée”. Par exemple, les déformations de cisaillement hors du plan, \varepsilon_{xz} et \varepsilon_{yz}, peuvent être autorisées à être non nulles. Une telle formulation, combinée à \varepsilon_{zz} = 0, est utilisée dans la version 2D de l’interface Ondes élastiques, explicite en temps.
Lois de comportement
Dans l’hypothèse de l’élasticité linéaire, la loi de Hooke peut être formulée pour les déformations planes et les contraintes planes. La forme 3D complète de la loi de Hooke est la suivante:
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\sigma_z &=&\frac{E}{1+\nu} \left ( \varepsilon_{zz} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 2G \varepsilon_{yz} \\
\tau_{xz} &=& 2G \varepsilon_{xz} \\
\end{array}}
{\ }
\]
Ici, E représente le module d’Young, ν est le coefficient de Poisson, and G est le module de cisaillement.
Déformations planes
Le cas des déformations planes est trivial; il suffit de supprimer les trois composantes de déformation qui sont nulles dans la formulation 3D,
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} \right )\right ) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} \right )\right) \\
\sigma_z &=&\frac{E \nu}{(1+\nu)(1-2 \nu)} \left( \varepsilon_{xx} + \varepsilon_{yy}\right ) &=& \nu \left ( \sigma_x + \sigma_y \right )\\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
Contraintes planes
Dans le cas des contraintes planes, on utilisera \sigma_z = 0 pour éliminer \varepsilon_{zz}, ce qui donne
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1-\nu^2} \left( \varepsilon_{xx} +\nu \varepsilon_{yy} \right) \\
\sigma_y &=& \frac{E}{1-\nu^2} \left( \varepsilon_{yy}+\nu \varepsilon_{xx} \right) \\
\sigma_z &=& 0 \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
La déformation transverse (donc la variation d’épaisseur) peut alors être calculée à partir de la solution comme étant \varepsilon_{zz} = – \frac {\nu} {1-\nu} (\varepsilon_{xx} + \varepsilon_{yy}).
Dans COMSOL Multiphysics®, cette formulation n’est toutefois pas utilisée. À la place, la loi de Hooke 3D complète est associée à une inconnue supplémentaire pour \varepsilon_{zz}. Bien entendu, cela augmente la taille totale du problème, mais les bénéfices sont importants : il n’est pas nécessaire de considérer des formes de contraintes planes spécifiques à toutes les lois de comportement, et il n’est pas non plus nécessaire de modifier, par exemple, la dilatation thermique ou d’autres caractéristiques similaires. Si vous tracez la contrainte transverse, \sigma_{z}, vous remarquerez cependant que la valeur n’est pas identiquement nulle, car elle est calculée à partir des champs de déformation en utilisant la loi de Hooke.
Déformation plane généralisée
Ce cas est un peu plus complexe. Lorsque les hypothèses pour les déformations hors du plan sont injectées dans la relation constitutive, les composantes de la contrainte deviennent explicitement dépendantes des coordonnées x et y du fait des coefficients a, b, et c.
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\sigma_z &=&\frac{E}{1+\nu} \left( ax +by +c +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
Matériaux incompressibles
Plus le niveau de compressibilité est faible, plus le couplage entre l’action dans le plan et hors du plan est fort. En particulier, de nombreux modèles de plasticité, de fluage et d’hyperélasticité supposent l’incompressibilité. Lorsque l’on travaille avec de telles lois de comportement, l’effet de l’hypothèse 2D utilisée est particulièrement fort.
Quelle formulation dois-je choisir?
Examinons le cas simple d’une plaque rectangulaire percée d’un trou circulaire en son centre. Nous commencerons par une plaque très fine, puis nous passerons à un objet plus épais où le trou ressemblera davantage à un long tunnel percé.
Les dimensions de la plaque dans le plan sont de 2 m x 1 m, et le diamètre du trou est de 0.4 m. Une sollicitation en traction de 1 MPa est appliquée. Les données matériaux relatives à l’acier sont utilisées. La solution pour les contraintes planes est illustrée ci-dessous.
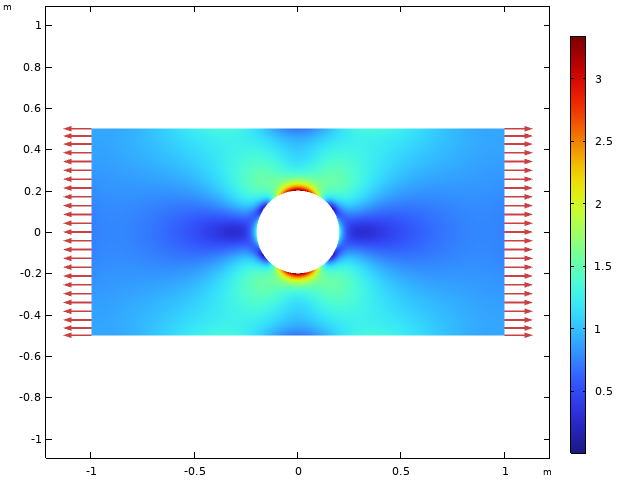
Contrainte équivalente de Von Mises, en utilisant une hypothèse de contraintes planes.
Dans l’hypothèse des contraintes planes, la contrainte transverse, \sigma_{z} , est nulle.
Ensuite, nous nous tournons vers une solution 3D complète et examinons à nouveau le même objet, mais avec des épaisseurs de 0.1, 1 et 10 m, respectivement. Dans la figure ci-dessous, la contrainte transverse, \sigma_{z}, est tracée.
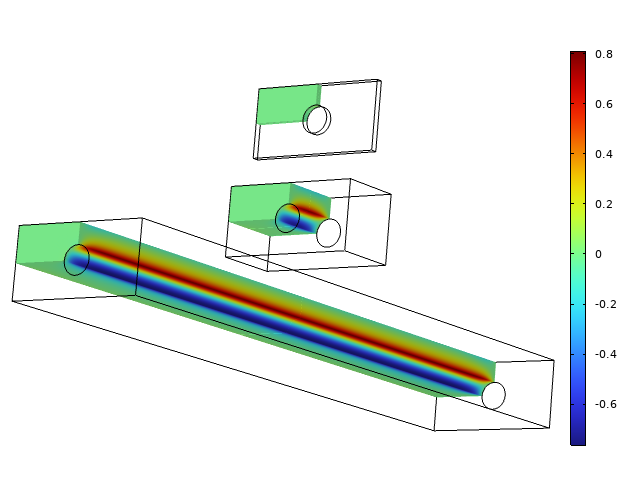
Contrainte transverse pour trois épaisseurs différentes.
La contrainte transverse est négligeable pour la configuration mince, l’hypothèse de contraintes planes est donc bonne. Pour l’épaisseur intermédiaire, l’état de contrainte est entièrement tridimensionnel. Pour un objet long, une contrainte transverse constante prédomine, sauf aux extrémités. Notez que la contrainte transverse maximale est de 0.8 MPa, ce qui est loin d’être négligeable par rapport à la charge appliquée.
Ci-dessous, la contrainte transverse à l’endroit le plus sollicité, au sommet du trou, est examinée plus en détail.
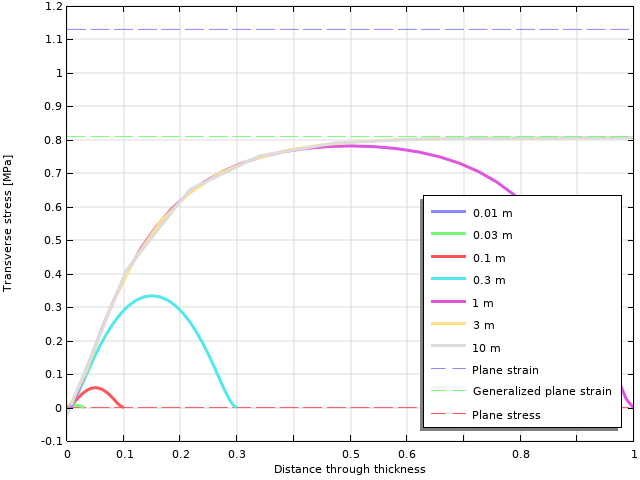
Variation de la contrainte transverse à travers l’épaisseur. Le paramètre des courbes est l’épaisseur de l’objet.
Comme on peut le voir, tant que l’épaisseur est de 1 m ou plus, un niveau maximal d’environ 0.8 MPa est atteint. Lorsque l’épaisseur est plus faible, la contrainte transverse maximale diminue rapidement.
Ce graphique va en fait nous aider à rectifier deux idées fausses fréquemment rencontrées:
- Ce n’est pas parce qu’un objet est libre dans la direction transverse qu’il est dans un état de contraintes planes.
- Un objet long n’est pas nécessairement en état de contraintes planes. Ceci n’est valable que si les extrémités sont fixes.
En réalité:
- Un objet mince avec des frontières libres peut être approximé par une formulation de contraintes planes.
- Un objet long aux frontières libres peut, loin des extrémités, être approximé par une déformation plane généralisée.
- Un objet dont l’épaisseur est comparable aux dimensions dans le plan doit être traité comme étant en 3D.
En fait, l’affirmation selon laquelle les objets épais doivent être considérés comme étant dans un état de déformations planes est présente dans la plupart des manuels scolaires et sur internet. S’il est vrai que l’hypothèse de déformations planes est une meilleure approximation que celle des contraintes planes dans cette situation, ce n’est toujours pas correct. Une hypothèse de déformation plane généralisée est préférable.
Je pense personnellement que, puisque le travail avec des solutions 2D remonte à l’époque où de nombreux problèmes étaient résolus à l’aide d’un stylo et d’un papier, par exemple en utilisant la fonction d’Airy, le choix se résumait en pratique à “contraintes planes” ou “déformations planes”. Avec un logiciel d’éléments finis, la déformation 3D complète ou la déformation plane généralisée sont de meilleures options pour les objets plus épais.
Pourquoi les contraintes transverses apparaissent-elles?
Dans l’exemple ci-dessus, nous avons vu que des contraintes importantes se développent dans la direction transverse, même si l’objet est libre de se déplacer dans cette direction. Pour quelle raison ? Sous l’effet du coefficient de Poisson, il y aura un changement d’épaisseur dans la direction hors du plan. Tant qu’il existe un gradient de contrainte (et de déformation) dans le plan, cette variation d’épaisseur n’est pas uniforme. Au niveau d’une concentration de contraintes, comme le trou dans la plaque, la partie du matériau située au point le plus sollicité tend à devenir plus mince que le matériau environnant, qui s’oppose alors à la déformation.
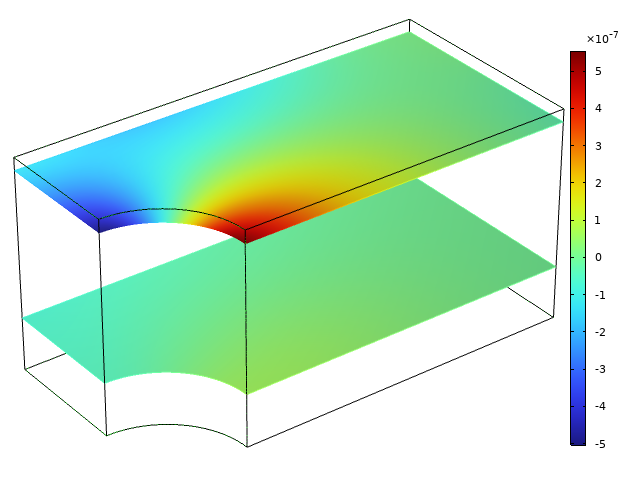
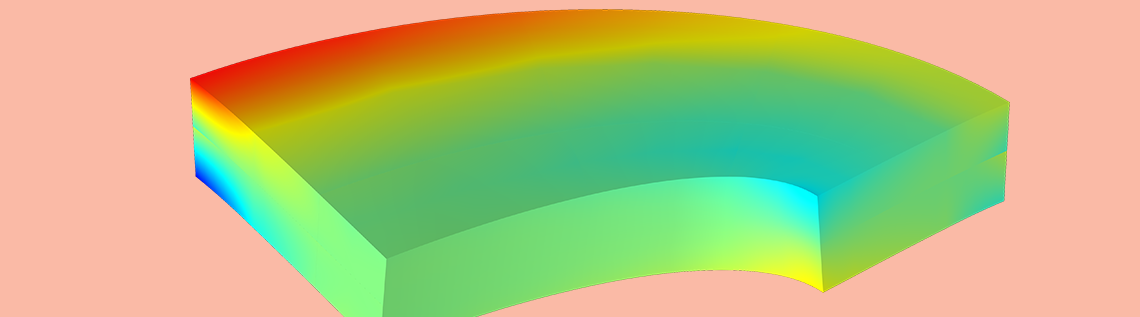
Variation du déplacement transverse loin de la surface libre (en bas) et près de la surface libre (en haut). Dans chaque plan de coupe, le déplacement moyen est fixé à zéro.
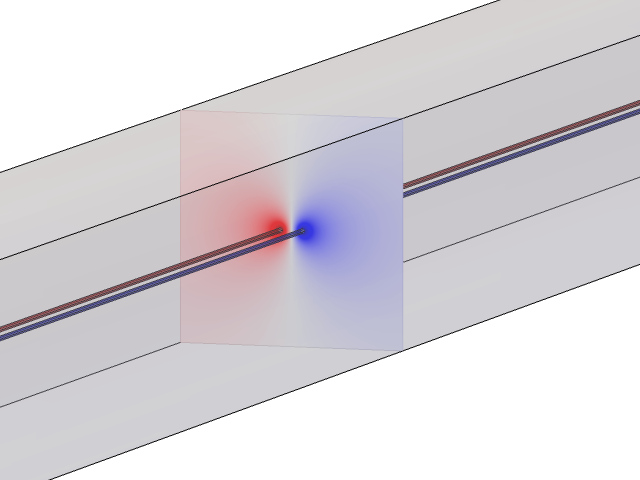
Dans la section précédente, il a été noté que la valeur de la contrainte transverse varie en fonction de la distance à la surface libre. La distribution détaillée de la contrainte diffère également avec la distance à la surface libre, comme l’illustre la figure ci-dessous.
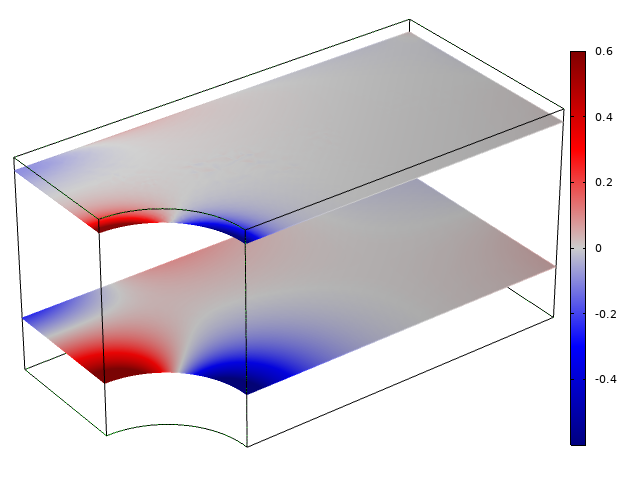
Distribution de la contrainte transverse loin de la surface libre (en bas) et près de la surface libre (en haut). Les champs des contraintes sont mis à l’échelle pour avoir la même valeur de pic dans les deux plans de coupe; la contrainte réelle est plus faible près de la frontière.
Loin de la surface libre, la contrainte transverse est directement proportionnelle aux déformations dans le plan \varepsilon_x+\varepsilon_y. La section entière conserve une épaisseur plus ou moins uniforme en raison de l’effet de contrainte du matériau environnant. Cependant, près de la surface libre, la contrainte transverse est plutôt élevée là où il existe de grands gradients de déformations dans le plan; dans ce cas, au voisinage du trou.
Qu’en est-il des contraintes dans le plan?
Lorsque la structure est soumise uniquement à des efforts de traction (et non à des déplacements imposés), l’état de contrainte dans le plan est indépendant de l’hypothèse 2D, du moins pour l’élasticité linéaire. Mais ce n’est pas tout. Dans la figure ci-dessous, la contrainte dans la direction x est tracée à l’endroit le plus sollicité, au sommet du trou.
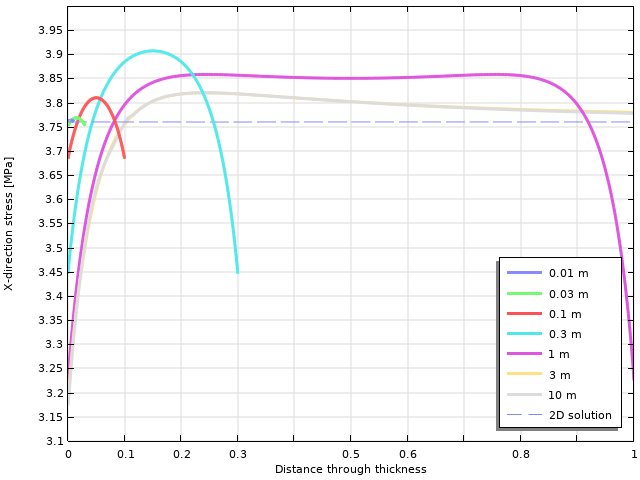
Variation de la contrainte horizontale à travers l’épaisseur. Le paramètre des courbes est l’épaisseur de l’objet.
Comme on peut le voir, il y a une forte variation à travers l’épaisseur. Pour les objets minces, la valeur 2D coïncide bien, alors que pour les objets plus épais, il y a une différence notable, en particulier à proximité de la surface libre. Cela a également des répercussions sur les contraintes équivalentes.
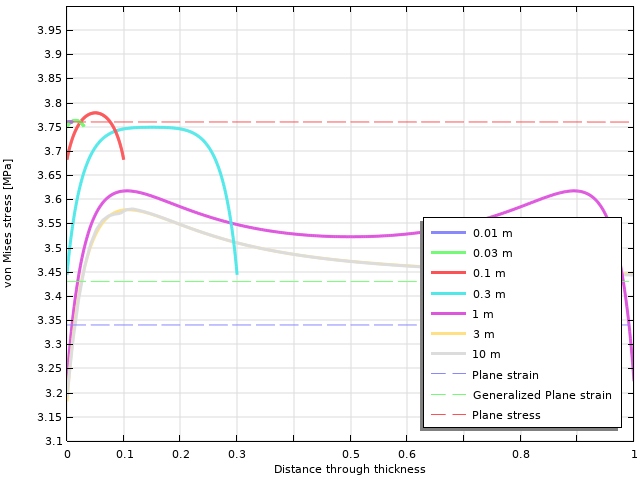
Variation de la contrainte équivalente de Von Mises à travers l’épaisseur. Le paramètre des courbes est l’épaisseur de l’objet.
Pour les objets plus épais, il existe une différence significative entre la contrainte équivalente réelle et l’une des solutions 2D. Ce n’est qu’à l’intérieur d’objets assez épais que la contrainte de von Mises convergera vers la solution de déformation plane généralisée.
Déformations inélastiques
Dans de nombreux cas, la différence entre les trois formulations n’est pas aussi prononcée que dans l’exemple précédent, où il y a une concentration importante de contraintes. Cependant, il existe des cas où il faut être particulièrement attentif : lorsque les déformations inélastiques deviennent significatives. Dans ce cas, ce n’est pas seulement l’effet du coefficient de Poisson sur les déformations dans le plan qui agit dans la direction transverse.
Considérons, par exemple, la dilatation thermique. Elle est généralement isotrope. Cela signifie que dans un contexte de déformations planes, où l’expansion hors du plan est bloquée, il y aura une forte accumulation de contraintes transverses. Un objet libre de se dilater dans le plan xy subira une contrainte transverse égale à \sigma_z = -E \alpha \Delta T. Si vous choisissez d’utiliser une formulation de contraintes planes ou de déformation plane généralisée, l’expansion dans la direction transverse est libre, et cette contrainte n’apparaîtra pas.
Pour illustrer l’importance de la formulation 2D dans le cas de la dilatation thermique, on étudie le cas suivant : une plaque carrée se déformant librement dans le plan xy est soumise à un champ de température où la température est proportionnelle à x*y. L’augmentation maximale de la température (dans le coin supérieur droit) est de 100 K. Les données matériaux utilisées sont celles de l’acier. La contrainte dans la direction transverse est représentée sur la figure ci-dessous.
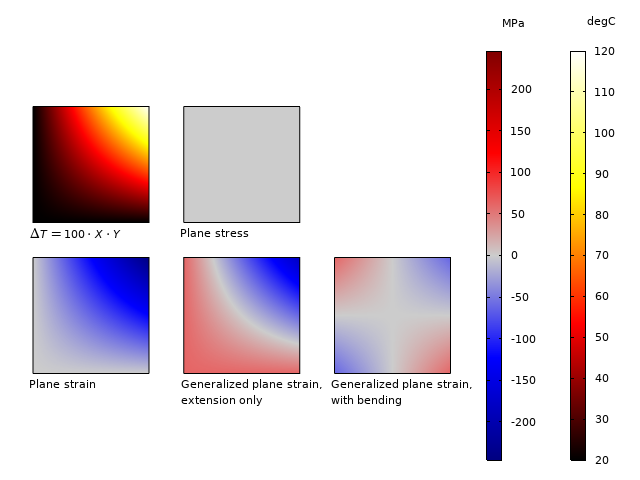
Distribution de la température et de la contrainte hors du plan \sigma_z pour différentes hypothèses 2D.
Les résultats montrent que:
- Dans le cas des contraintes planes, la déformation hors du plan est libre, de sorte qu’aucune contrainte n’est induite.
- Pour des déformations planes, la section entière subit une contrainte de compression, égale à \sigma_z = -E \alpha \Delta T(x,y). Cette contrainte est comprise entre -245 et 0 MPa.
- Pour une déformation plane généralisée avec allongement pur, une contrainte constante est ajoutée, de sorte que la valeur moyenne de \sigma_z devient nulle. La contrainte est comprise entre -184 et 61 MPa.
- Pour la déformation généralisée avec flexion, un champ de contrainte variant linéairement est ajouté. La contrainte varie maintenant de -61 à 61 MPa.
Remarques sur les contraintes équivalentes
Les deux mesures de contraintes scalaires les plus couramment utilisées sont la contrainte équivalente de von Mises et la contrainte équivalente de Tresca. Si on les exprime en termes de contraintes principales (\sigma_1 > ; \sigma_2 > ; \sigma_3), on a alors
et
Comme on peut le voir, la contrainte principale intermédiaire affecte la contrainte équivalente de von Mises, mais pas la contrainte équivalente de Tresca. Pour les cas 2D, la composante de contrainte hors du plan \sigma_z est toujours l’une des contraintes principales. En contraintes planes, elle est nulle. Pour un matériau élastique linéaire en déformations planes, elle vaut \sigma_z = \nu \left ( \sigma_x + \sigma_y \right ) = \nu \left ( \sigma_{1 \mathrm p} + \sigma_{2 \mathrm p} \right ) . Cette expression fait intervenir les deux contraintes principales dans le plan. Si \sigma_{1 \mathrm p} et \sigma_{2 \mathrm p} sont de signes différents, alors \sigma_z est toujours la contrainte principale intermédiaire, et la contrainte équivalente de Tresca de dépend pas de l’hypothèse utilisée, contraintes planes ou déformations planes.
Ce comportement invariant ne peut être observé pour la contrainte équivalente de von Mises en raison de sa dépendance à la contrainte principale intermédiaire.
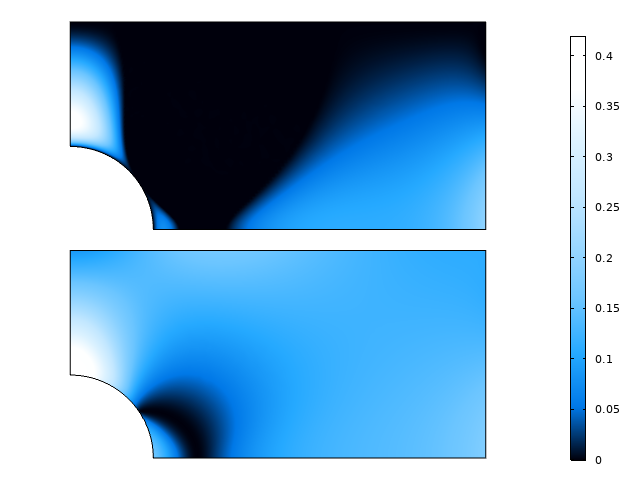
Différence entre les valeurs de contrainte équivalente dans des conditions de contraintes et de déformations planes. Tresca (en haut) et von Mises (en bas). Notez la grande région noire où la différence est nulle dans le cas de Tresca.
Remarques sur la mécanique de la rupture
En mécanique de la rupture, il est courant d’analyser des plaques épaisses en supposant une déformation plane. Maintenant que nous avons vu que la déformation plane généralisée ou la 3D complète sont en fait des choix plus pertinents, on peut se demander dans quelle mesure cette approche est correcte.
Dans ce contexte, c’est principalement le comportement en pointe de fissure qui est important. L’état de déformation à cet endroit est singulier, de sorte que le matériau a tendance à se contracter dans le sens de l’épaisseur. Le matériau environnant résiste à cette contraction, ce qui résulte en une forte contrainte s’opposant au déplacement dans le sens de l’épaisseur. Ainsi, l’état de contrainte à proximité de la pointe de la fissure s’apparente à un état de déformations planes. En fait, une solution de déformations planes et une solution de déformation plane généralisée donneront des résultats assez similaires près de la pointe de la fissure. Cela ne veut pas dire que l’hypothèse de déformations planes peut s’appliquer à l’ensemble d’un corps fissuré plan. En fait, la solution de déformations planes sous-estime quelque peu les déformations globales. Dans la majeure partie de la plaque, où les gradients de contrainte sont faibles, l’hypothèse de contraintes planes constitue une meilleure approximation.
Théories 1D
Les structures élancées sont souvent modélisées à l’aide d’approximations de type poutre ou treillis, basées sur des théories uniaxiales. Les contraintes et les déformations dans les directions transverses ne sont pas directement prises en compte dans la formulation du problème. A y regarder de plus près toutefois, on constate qu’il existe une hypothèse sous-jacente selon laquelle il n’y a pas de contraintes dans ces directions. Il existe en fait deux directions orthogonales (arbitraires) dans lesquelles prévalent des conditions de contraintes planes. Il est possible de calculer ces composantes a posteriori, si le besoin s’en fait sentir. Pour un matériau élastique linéaire, la définition du coefficient de Poisson peut être directement utilisée ; la déformation transverse est \varepsilon_T = -\nu \varepsilon_A, où \varepsilon_A est la déformation axiale.
À partir de la version 6.1 de COMSOL Multiphysics®, l’interface de Mécanique du solides est également disponible pour les géométries 1D et 1D-axisymétriques. Dans ce cas, vous devez également faire un choix en ce qui concerne le comportement hors plan. En 1D, vous pouvez choisir indépendamment entre contrainte plane, déformation plane et déformation plane généralisée dans les deux directions transverses. En axisymétrie 1D, vous disposez des trois mêmes options pour le comportement dans la direction de l’épaisseur.


Une partie des fenêtres de Réglages de l’interface Mécanique du solide en axisymétrie 1D et 1D.
Prochaine étape
Le module Structural Mechanics, complément à COMSOL Multiphysics®, intègre des fonctionnalités dédiées à la modélisation des contraintes et des déformations planes. Pour en savoir plus sur ce module, cliquez sur le bouton ci-dessous:


Commentaires (0)