Maximiser les fréquences propres grâce à l’optimisation de forme et l’optimisation topologique

De nombreux composants mécaniques fonctionnent dans des environnements soumis à des vibrations, qui sont susceptibles de provoquer une résonance si les composants ont des fréquences propres basses. Cela peut avoir des effets plus ou moins graves, allant d’une légère nuisance pour une garniture automobile ou d’erreurs critiques dans des procédés de haute précision, jusqu’à des défaillances plus graves dans le domaine du génie civil. Cet article de blog montre comment maximiser la fréquence propre la plus basse en s’appuyant sur l’optimisation de forme et l’optimisation topologique afin de réduire le risque de résonance. Les fonctionnalités prédéfinies de COMSOL Multiphysics® permettent de résoudre ces problématiques avec de l’optimisation basée sur le gradient.
Introduction à la résonance mécanique
Lorsqu’un système mécanique est excité par une force dont les composantes fréquentielles correspondent aux fréquences naturelles du système, une résonance mécanique peut apparaître, entraînant des vibrations avec de fortes amplitudes. Cet effet peut être exploité (par exemple dans les montres et instruments de musique), mais dans cet article de blog nous nous focaliserons sur les résonances non désirées, qui peuvent causer des problèmes de fatigue dans des machines ou des défaillances en génie civil. Différentes mesures peuvent être prises pour réduire la résonance, comme installer des systèmes d’isolation active ou passive des vibrations, ou indiquer aux utilisateurs d’éviter un comportement pouvant induire une résonance. Par exemple, comme le montre l’image ci-dessous, un célèbre pont à Londres comporte un panneau qui indique aux soldats de rompre le pas lorsqu’ils traversent le pont – ainsi le rythme unifié de leur marche ne causera pas de résonance mécanique dangereuse.
Une autre stratégie pour éviter la résonance mécanique consiste simplement à augmenter la fréquence naturelle la plus basse. Nous allons explorer ici comment y parvenir grâce à l’optimisation.

L’Albert Bridge à Londres comporte un panneau indiquant aux soldats de rompre la marche sur le pont pour éviter la résonance. Image originale de Colin Smith, sous licence CC BY-SA 2.0 via Wikimedia Commons.
Introduction à l’optimisation
Dans tout problème d’optimisation, on trouve un certain nombre de variables qui devront être modifiées par un algorithme d’optimisation de façon à améliorer une certaine quantité — la fonction objectif. Il peut également y avoir des exigences selon lesquelles d’autres variables ne doivent pas dépasser certaines limites, aussi appelées contraintes. Dans le contexte de la CAO, l’objectif est souvent calculé en utilisant la simulation.
En ce qui concerne les algorithmes d’optimisation, on peut faire la distinction entre:
- L’optimisation sans gradient, où l’on utilise uniquement les valeurs des objectifs et contraintes pour mettre à jour les variables de conception
- L’optimisation basée sur le gradient, où l’on connaît également la sensibilité de l’objectif et des contraintes aux changements des variables de conception
L’optimisation basée sur le gradient est beaucoup plus riche en informations à chaque itération et est par conséquent beaucoup plus rapide, en particulier pour les problèmes avec un grand nombre de variables de conception. L’écart de vitesse est tellement important que la première approche est inadaptée pour la plupart des applications d’optimisation de forme et d’optimisation topologique. COMSOL Multiphysics® prend en charge ces deux types d’optimisation, mais nous nous concentrerons ici sur l’optimisation basée sur le gradient.
Dans les exemples suivants, l’objectif est de maximiser la fréquence propre la plus faible, mais l’on pourrait également maximiser la distance à une fréquence non désirée qui apparaît peut-être naturellement dans l’environnement. Un aspect récurrent des problèmes aux fréquences propres est que même si une structure contient des symétries de conception, ses modes propres peuvent être non symétriques. La structure complète doit donc être modélisée à chaque itération. Toutefois, dans le cas où le design initial présente une symétrie, il est possible de la conserver par l’utilisation de la fonctionnalité Symétrie miroir dans l’interface Optimisation de forme ou Optimisation topologique.
Optimisation de forme
Le premier exemple est un modèle de coque fixée à une extrémité. La continuité du vecteur normal est assurée par l’utilisation d’une régularisation basée sur une équation aux dérivées partielles (EDP) pour la déformation de la frontière, \mathbf{d}, similaire au filtre de Helmholtz utilisé pour l’optimisation topologique, soit,
où d_\mathrm{max} est le déplacement maximum, L_\mathrm{min} une longueur de filtre, d_\mathrm{max}/L_\mathrm{min} la pente maximale de la déformation, et \mathbf{c} le champ de la variable de contrôle décrivant la déformation de la frontière. L’optimisation de forme fait également intervenir une EDP pour le lissage des éléments intérieurs, mais en pratique, tout est géré par les fonctionnalités Domaine de forme libre, Frontière de forme libre, et Coque de forme libre de l’interface Optimisation de forme. Ces fonctionnalités permettent uniquement une optimisation basée sur le gradient. Comme alternatives à la régularisation de la forme basée sur l’EDP, il est également possible d’utiliser des techniques de régularisation polynomiale ou d’apporter de simples modifications à la géométrie, comme des translations, rotations et mises à l’échelle. (En découvrir plus sur la translation et la mise à l’échelle dans notre série en deux parties sur l’optimisation de forme en électromagnétisme.) L’animation ci-dessous montre le résultat de l’utilisation de la régularisation basée sur l’EDP tout en préservant la symétrie du design.
Le design de la coque est animé tout au long de l’historique de l’optimisation.
Le changement de mode est géré en résolvant toujours les six premières fréquences propres et en utilisant la méthode des asymptotes mobiles (MMA) pour maximiser la fréquence propre minimale.
L’exemple suivant considère un support de fixation solide, mais sa géométrie s’apparente à une coque, il est donc logique de préserver l’épaisseur des bras du support de fixation. Cela peut être réalisé en combinant un opérateur Extrusion générale avec une fonctionnalité de Déformation imposée (voir Bracket — Eigenfrequency Shape Optimization dans la Bibliothèque d’applications pour en savoir plus). Par ailleurs, l’implémentation est similaire au modèle précédent en termes d’objectif et de contrôle de la symétrie, mais le design étant déjà assez satisfaisant, l’amélioration est moins spectaculaire (comme c’est illustré ci-dessous).
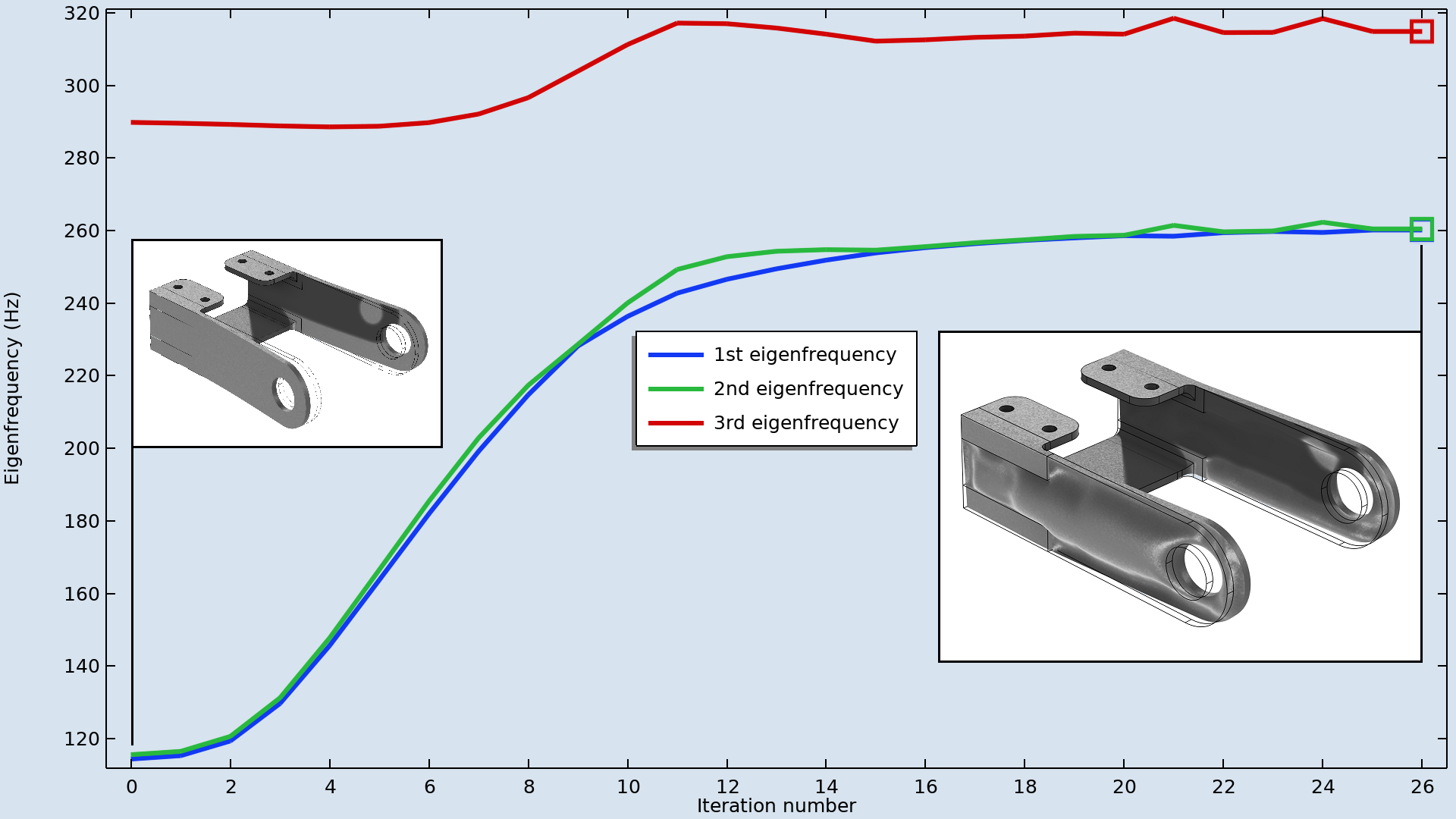
L’évolution de l’optimisation est montrée par des encarts, illustrant la géométrie initiale et optimisée du bracket pour le premier et le deuxième mode propre, respectivement. Le support est fixé par quatre petits trous.
Optimisation topologique
L’optimisation basée sur le gradient peut également être exploitée pour réaliser une optimisation topologique, en particulier lorsque l’on utilise l’interface Optimisation topologique dans le logiciel. Une introduction détaillée à l’optimisation topologique est disponible dans notre article de blog “Performing Topology Optimization with the Density Method”. L’idée de base est d’introduire le champ d’une variable de conception variant dans l’espace, \theta_c, bornée entre 0 et 1, correspondant au vide et au matériau solide, respectivement. Pour la mécanique du solide, on peut faire dépendre de cette variable la masse volumique et le module d’Young (la rigidité). Cette dépendance n’est pas explicite, car il est avantageux de régulariser le problème avec une échelle de longueur minimale, L_\mathrm{min}. Il est également nécessaire d’interpoler la masse volumique, \rho, différemment de ce qui est fait pour la rigidité, E, afin d’éviter que des valeurs intermédiaires de la variable de conception ne dominent le design optimisé du fait de leur bon rapport rigidité/poids. La relation entre la variable de contrôle et les propriétés matériau est donnée par:
où \theta_f est la variable de conception filtrée, \beta est le paramètre de pente de la projection, et p_\mathrm{SIMP} est le paramètre du matériau solide isotrope avec pénalisation (SIMP). Ces paramètres peuvent avoir une influence forte sur le design optimisé. Pour éviter les mauvais minimums locaux il peut donc être nécessaire de résoudre le problème d’optimisation pour diverses combinaisons de ces deux paramètres. C’est à dire que l’on résout un balayage paramétrique de problèmes d’optimisation, comme cela est illustré par l’exemple de poutre ci-dessous. La poutre est fixée sur la gauche et supporte un poids à l’extrémité droite, correspondant à 15% de son poids total. La poutre est soumise à une contrainte volumique de 40%. Le problème d’optimisation topologique est résolu pour cinq combinaisons de paramètres (p_\mathrm{SIMP}, \beta), valant (1, 2), (2, 4), (3, 8), (4, 16), et (5, 32). Une connectivité basse et des zones grises sont attendues pour les optimisations initiales, mais ces designs non physiques donnent de bons designs initiaux pour les optimisations suivantes.
Le design d’une poutre est animé tout au long du processus d’optimisation. Le déplacement est affiché via les couleurs sur l’isovaleur \theta=0.5.
Dans le cadre de l’optimisation topologique, une bonne pratique consiste à effectuer une vérification de la simulation sur le maillage ajusté à la pièce optimisée. Ceci a été mis en place dans la version de ce modèle disponible dans la Bibliothèque d’applications, et les résultats présentent de meilleures performances en termes de fréquences propres plus élevées que le résultat brut de l’optimisation. C’est attendu, étant donné que la représentation implicite du design rend le matériau moins rigide à proximité de l’interface solide-vide.
Au final, un seul résultat d’optimisation est montré ici, mais il est facile de générer des designs alternatifs en utilisant différentes valeurs pour la fraction volumique, la masse ajoutée, ou l’échelle de longueur minimale.
Conclusion
Il est possible d’utiliser l’optimisation de forme et l’optimisation topologique pour maximiser des fréquences propres. Il n’est pas toujours possible d’imposer des conditions de symétrie, mais il est possible de contraindre l’optimisation de façon à obtenir un design symétrique. La stratégie min/max utilisée pour gérer le changement de mode pourrait également être appliquée si l’objectif était de maximiser la distance à une certaine fréquence non désirée.
Pour gagner en expérience avec la maximisation de fréquences propres, téléchargez les exemples mentionnés dans cet article de blog depuis la Bibliothèque d’applications:


Commentaires (0)