Training Uncrewed Underwater Vehicles for Visualization of Subsurface Structures
The University of Southern Mississippi builds and uses simulation apps to integrate machine learning models into the training of uncrewed underwater and surface vehicles.
By Joseph Carew
April 2025
On a calm day along the coast of Mississippi, a small surface vessel is pulled methodically back and forth in a test area. This low magnetic signature sensor platform is hard at work scanning the seabed for ferromagnetic targets. These scans are just one part of an ambitious project conducted by the University of Southern Mississippi’s (USM) Roger F. Wicker Center for Ocean Enterprise. Through a combination of modeling, simulation, and machine learning (ML), USM researchers are laying the groundwork for intelligent uncrewed underwater vehicles (UUVs) capable of autonomously and accurately revealing what lies beneath the waves.
Modeling Ferromagnetic Structures on the Ocean Floor
Resting on the bottom of most harbors (and the ocean floor more generally) are ferromagnetic materials such as anthropogenic structures and debris, and even unexploded ordnance. To keep harbor traffic from hitting these hazards, navigational charts need to accurately reflect their locations. One of the more effective methods for scanning for these underwater magnetic anomalies is by using UUVs with advanced sensor equipment. However, these vehicles come with certain challenges, as they are expensive to build, their physical scans are complex, and, due to significant platform noise and environmental noise (such as environmental clutter and wind and waves), they do not always paint an accurate picture. To further complicate matters, the nonuniqueness of certain seafloor signatures can cause scans of different subsurface configurations to look similar. A team at USM is researching how to overcome these challenges and pave the way for better UUV-based sensing and mapping.
"We do a lot of data-driven testing and evaluation of emerging uncrewed systems platforms — both undersea and at the surface (Figure 1) as well as advanced sensor integration," said Dr. Jason McKenna, a researcher at USM. "In particular, we are studying the integration of magnetic sensors directly onto UUVs, where there is a lot of environmental and platform noise." The research team turned to modeling (validated through empirical data), simulation apps, and machine learning techniques to develop a computational system that can be integrated into a UUV for automatic target recognition (ATR) and improved accuracy of the magnetic and ultimately gravitational fields data that the vehicle is registering.

Not Quite 20,000 Leagues Under the Sea
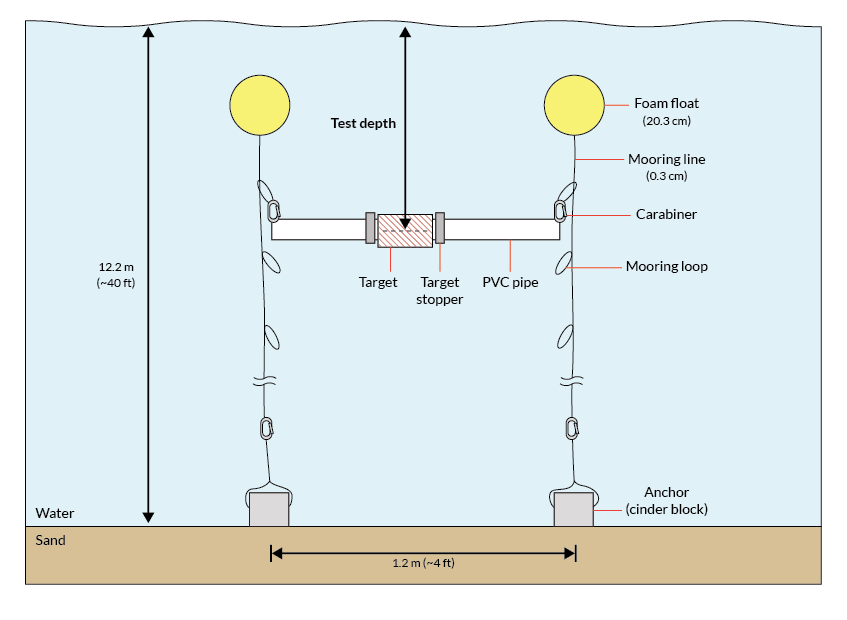
Before creating models, the team had to obtain the real-world data that would be used to benchmark and validate the models. To do this, the team went to a controlled maritime environment with known targets that could be surveyed with high-precision gravity and magnetic sensors. The physical experiment took place near the Gulf of Mexico, where the team used a winch system to draw a sensor platform 70 meters between two points. Beneath the surface, the sensor platform scanned one of two different targets: a 20.3-cm-long cylindrical magnet that has a 2.5-cm diameter and is resting vertically (Figure 2) or a 30.5-cm-long steel pipe that has a 11.4-cm diameter and is resting horizontally (Figure 3). The team repeated this for several trials per target, with the canisters that held the magnet or pipe placed at depths of 1 meter, 3 meters, and 5 meters.
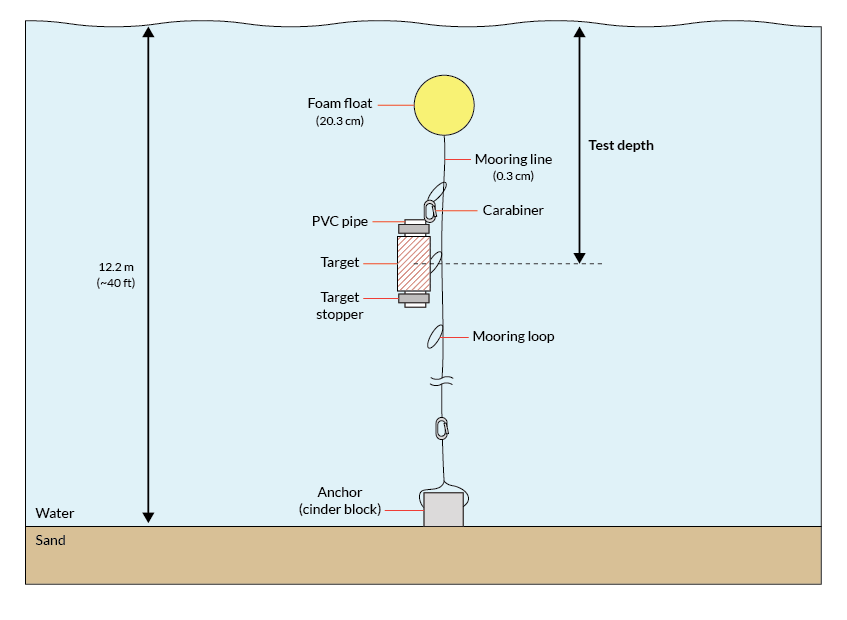
"The physics we are talking about here is governed one over r-cubed decay, so the magnetic field falls off very quickly," McKenna said. "If you want to observe anything, you have got to be close to the target. That is why when you are doing archeological surveys, generally speaking, you are towing the magnetometer so it is far enough away from the ship's signature, which is introducing noise, and you are flying it just a few meters off the seafloor."
McKenna explained that his team used a magnet that resulted in a stronger signature than what the sensor would likely encounter in the field. This was chosen purposefully.
"The data we use is never that clean but this experiment shows you that with the right approach, the right physics, and the right boundary conditions, you could start to approximate a lot of what you would experience in individual targets of interest," McKenna said. "Then you start adding all those targets together and introduce platform noise and use it to get very complicated results."
Developing Models For Synthetic Data Production
Once the physical experimentation phase was complete, there were several steps the USM team had to take in order to obtain the algorithms they needed to enhance the UUV’s performance. Ultimately, the process involved creating potential field models and performing uncertainty quantification (UQ) analyses; creating simulation apps based on the validated models that can train ML algorithms; and then, finally, using those algorithms to train the ML modes to help the UUVs detect objects of interest.
Potential Field Models
McKenna and his team used the COMSOL Multiphysics® simulation platform together with the AC/DC Module to build potential field models. These models can represent the interactions between magnetic, gravitational, or thermal fields and objects and are thus essential for quantifying the signatures of the seafloor and its objects.
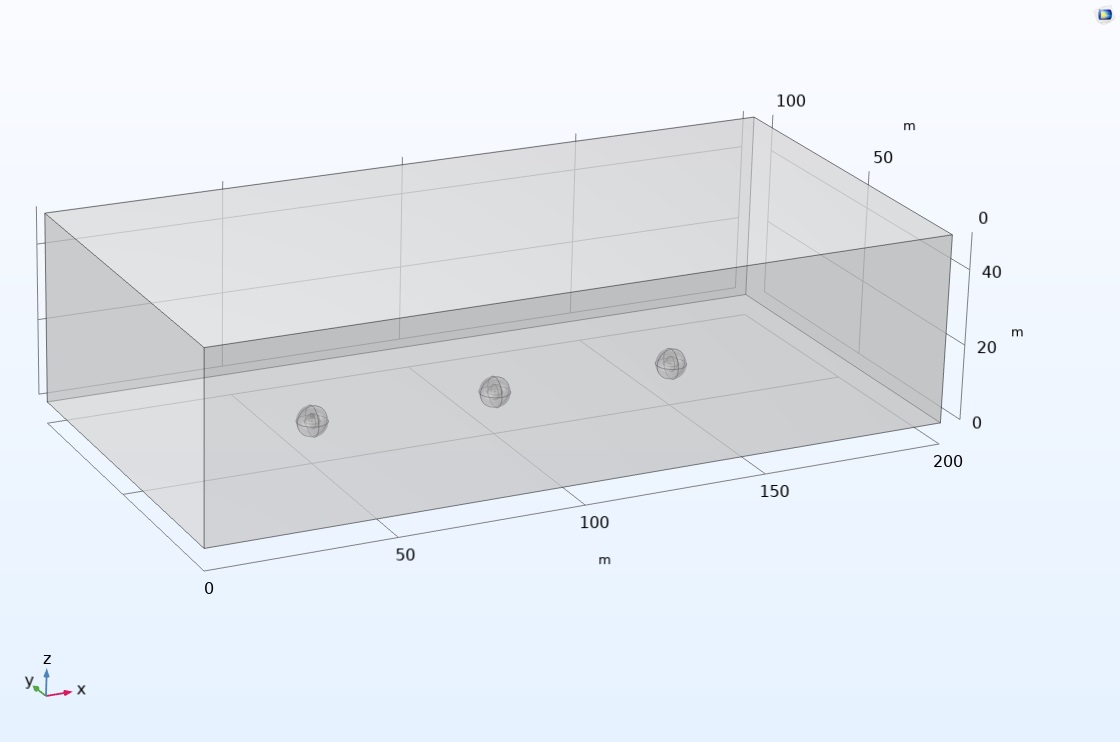
He began by defining the target object's physical properties and generating a series of targets to create a test bed using the built-in Magnetic Fields, No Current interface in the software. He then introduced the spatial configuration with low (30.5 cm, or 12 inches), medium (70 cm, or 24 inches), and high (91.4 cm, or 36 inches) magnetic targets in the simulation space (Figure 4). Finally, he calculated the targets' interactions with the surrounding medium. The gravity and magnetic anomalies (the targets) were subsequently recorded from various UUV simulations, which provided a large dataset that captured the nuances of the potential field variations in different scenarios. To inform these UUV simulations, the research team used UQ analyses.
Scoping Out Variables with Uncertainty Quantification
UQ studies were integrated into the team's process in order to examine the role of uncertainty when modeling the operation of a UUV and to fill in the gaps for parameters that could not be replicated in a real-world experiment. Specifically, McKenna conducted a screening and sensitivity analysis using the Uncertainty Quantification Module, another add-on to COMSOL Multiphysics. The module acts as a general interface for characterizing uncertainties and propagating input uncertainties in models and statistically analyzing output quantities of interest.
"The model uncertainty quantification was fairly intuitive," McKenna said. "We wanted to try to do a screening analysis similar to what we would have done using a principal component analysis. It is a pretty elegant way to scope out the dependence of a lot of variables."
McKenna and his team were able to identify the expected ranges of the parameters of the ferromagnetic structures or devices they would be looking to measure with the scans. They were able to parameterize the targets by length, wall thickness, and magnetic susceptibility and then introduce the effects of Earth's magnetic fields (the party most responsible for inducing the signature in the metallic objects UUVs scan). The insight into the workable range of these parameters has allowed the potential field models to be easily recalibrated and solved, thus replicating various UUV runs that would normally take the team days on the water and come at a great expense computationally.
By varying the magnetic latitude, longitude, and strength of the force field, plus or minus x percent, the team was able to measure the effects of the alterations. "You could do a sensitivity analysis that way. You can use uncertainty quantification to find these value ranges and come up with some understanding and establish whether or not measurements are as you would expect," McKenna said. "In a matter of minutes to an hour we can build up a rich and robust training set for the machine learning algorithms."
From Validated Models to ML Training Apps
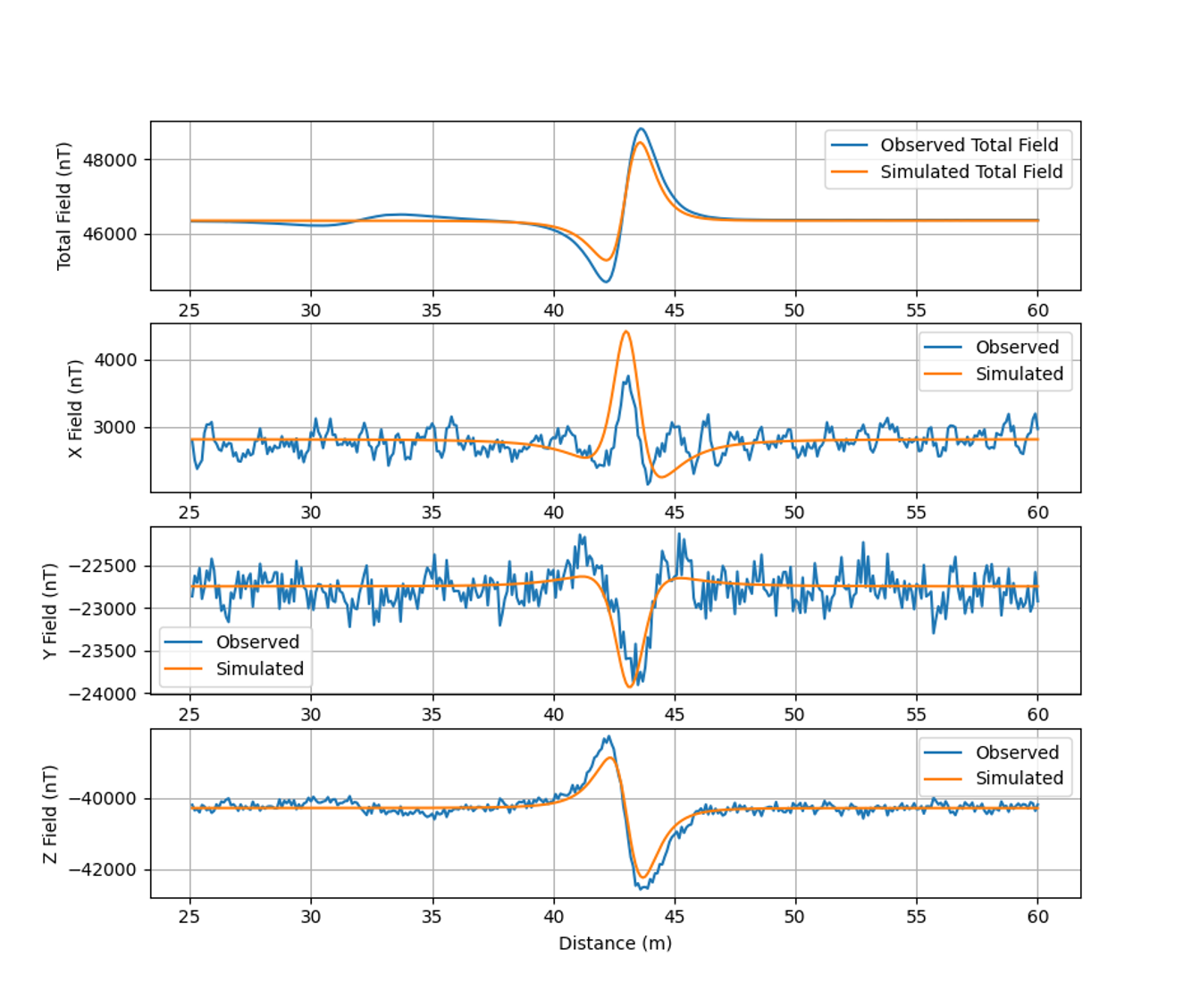
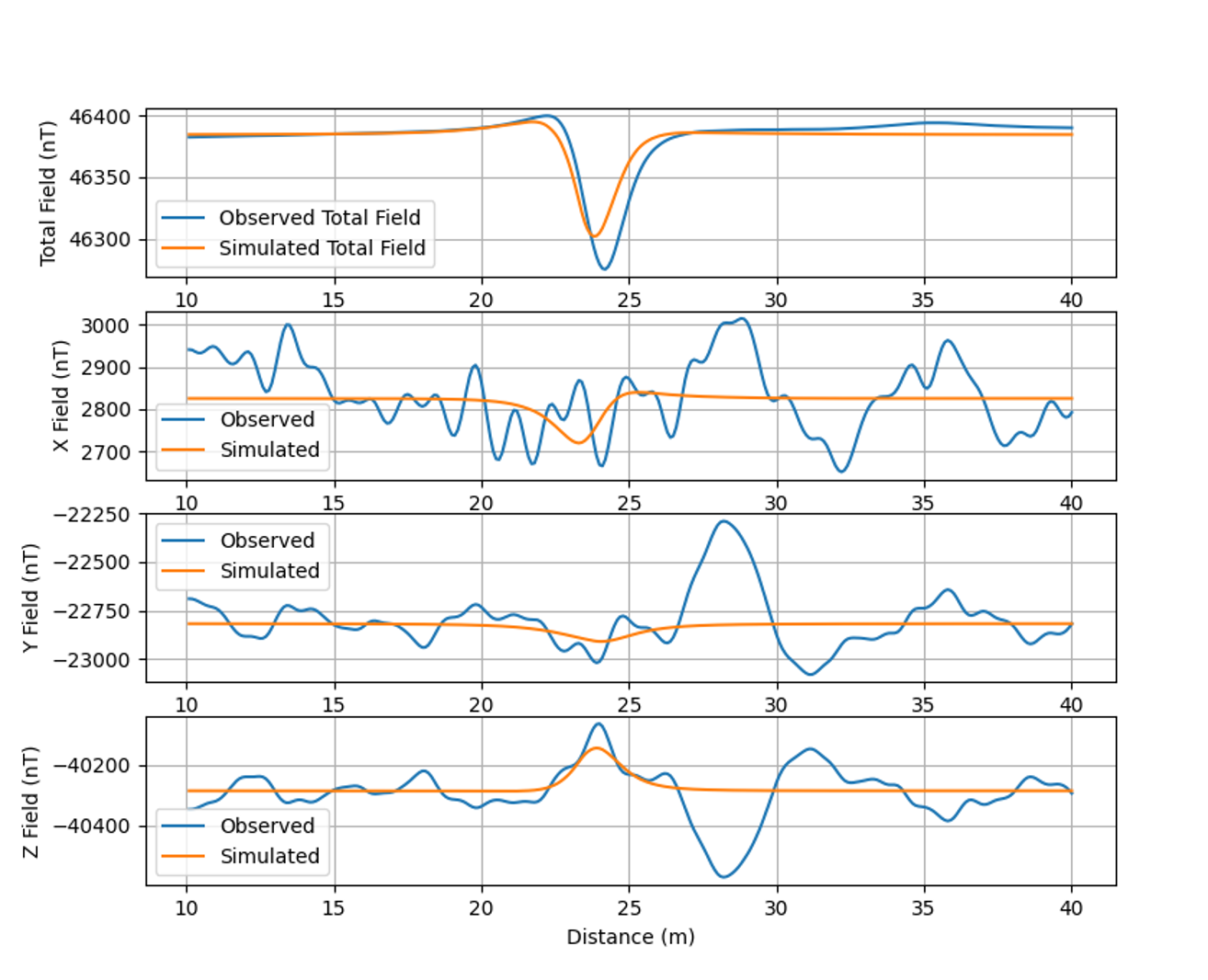
Once the uncertainty quantification studies were complete and the potential field models were established, McKenna was able to compare the results of the simulation with his real-life experiments (Figure 5). He created several simplistic models for the comparison and gained many meaningful results with close agreement.
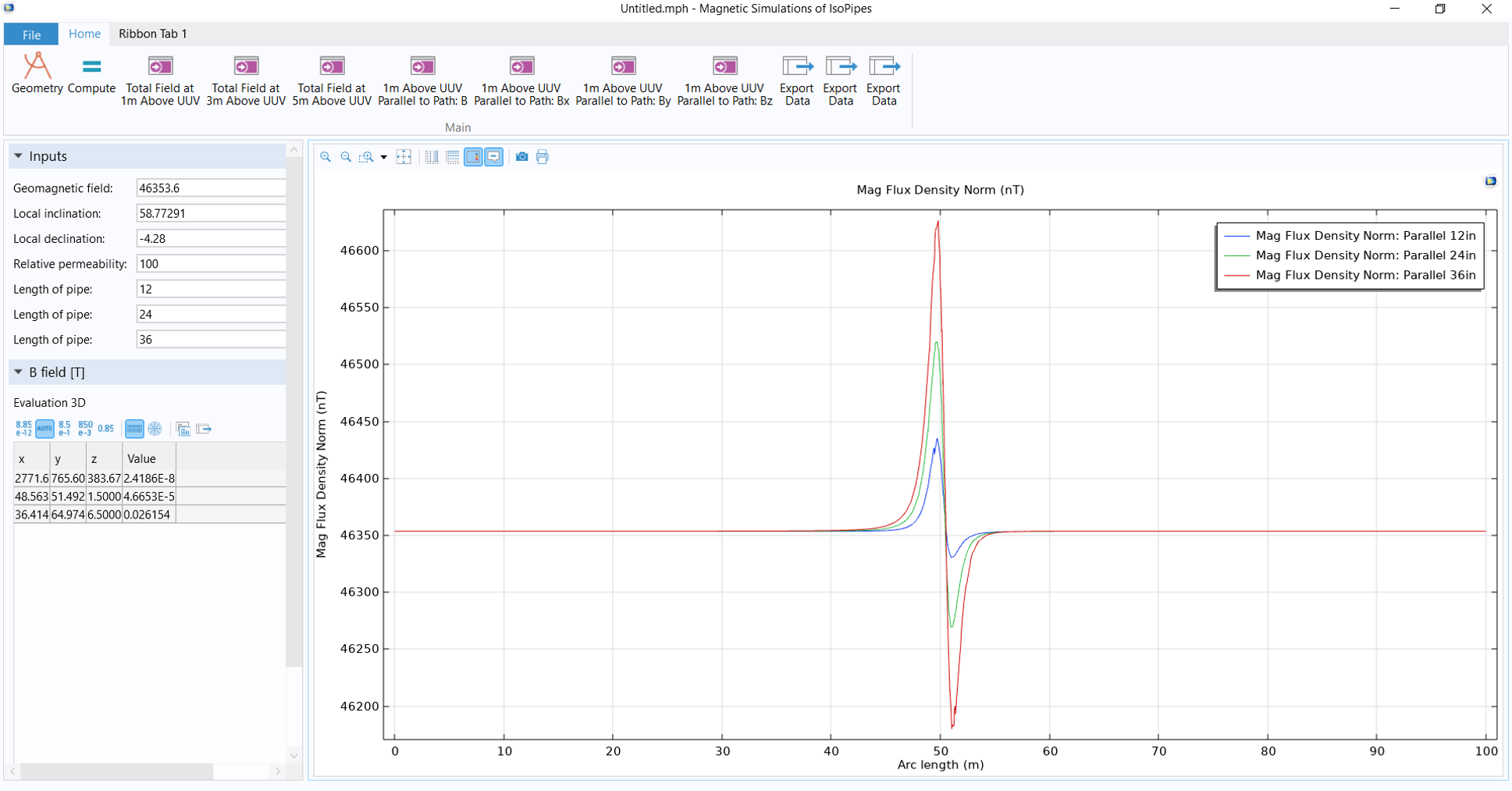
The positive results led McKenna to use the validated models to create simulation apps (Figure 6) for the data science team, which requires access to a significant amount of training data for ML algorithms. McKenna used the Application Builder in COMSOL Multiphysics to create the apps, which are easily digestible and enable the scientists to generate ML training data.
"I was able to build the apps by following along with some examples, and, within a matter of an hour or two, get the apps up and running," McKenna said. "You can start to put in the different parameters, and if you change them, the field lines change, which is exactly what we wanted."
The data science team needs to ensure that the models are able to capture these data points, and with COMSOL®, it has been able to do that without having to constantly monitor the model. The data science team can vary the parameters and develop a variety of signatures that the UUVs are expected to encounter and scan. The simulation apps have provided USM with the quality and quantity of data the algorithms need in order to be properly trained.
With the apps, USM was able to divide the research work in a way that allowed each team to flex its expertise. "Everyone was able to be productive within their own spheres of knowledge," McKenna said. "It takes a team to do something like this."
Machine Learning Techniques
The ML techniques the team used included long short-term memory (LSTM) network, regression, tree boosting, and deep neural network (DNN) models.
The LSTM models were used to assess how the predictive capabilities changed when running on simulated sensor sequence data. This assessment could further be used to determine if simulation could effectively be used in data augmentation for observational data. The regression, tree boosting, and DNN models were selected for confirmation of simulation data patterns.
These models were run exclusively on simulated data, and the LSTM models were run using an embedding sequence of 10 data points from a total of more than 500,000 data points. The models are compatible with sequence data, including time-series analysis, which makes them particularly useful for interpreting UUV integrated sensor data.
As explained in McKenna's paper for the COMSOL Conference (Ref. 1), "The synthetic datasets generated from our COMSOL models provide diverse training examples, allowing ML models to learn the complex temporal relationships and signature patterns associated with different target types."
Looking Ahead to Intelligent UUVs
Lying on the bottom of rivers, lakes, and waterways are ferromagnetic structures and devices that should be recorded for safety and navigational purposes. UUVs have a role to play in improving the navigational charts that can mark these potential hazards and improve the navigability of harbors. For instance, if a natural disaster were to sink ships and leave debris in unexpected places, smart UUVs would be able to quickly scan the seafloor and give insight into what lies below the waves.
The research team at USM is working at the confluence of simulation and machine learning to improve the predictive capabilities of UUVs. However, this project, which McKenna believes is a "blueprint for integrating simulation-driven ML into various geophysical and engineering domains," is just one step. His goal for the future is to add in more complexity to his models and emphasize phenomena that have yet to be factored in. This includes the self-demagnetization of larger ferromagnetic objects and incorporating physics such as acoustics and thermal phenomena. McKenna is also looking to deploy his apps internally for machine learning training through the app-management product COMSOL Server™, develop more realistic seafloor models, and further the use of uncertainty quantification optimization at USM.
Acknowledgement
This research was supported by a grant to USM from the Office of Naval Research.
Reference
- J. McKenna et al., "Potential Fields Modeling to Support Machine Learning Applications in Maritime Environments," COMSOL Conference 2024 Boston, 2024; https://www.comsol.com/paper/potential-fields-modeling-to-support-machine-learning-applications-in-maritime-environments-135922