
Modélisation d’une pince acoustique: streaming thermoacoustique et suivi de particules

Les pinces acoustiques permettent de manipuler, sans contact direct, des cellules et des particules dans un large éventail d’applications biomédicales. Dans une pince acoustique typique, un transducteur piézoélectrique induit un champ de pression dans un fluide, générant des forces de rayonnement acoustique qui piègent efficacement les petits corps en suspension dans le fluide. Dans cet article de blog, nous allons examiner de plus près un modèle de pince acoustique, incluant streaming thermoacoustique et suivi de particules.
Une brève introduction aux pinces acoustiques
C’est en 1874 qu’August Kundt a démontré pour la première fois que les ondes sonores pouvaient exercer des forces de rayonnement acoustique sur des particules exposées. Depuis les années 90, ce principe est utilisé dans les dispositifs microfluidiques et les laboratoires sur puce. Aujourd’hui, les pinces acoustiques disponibles sur le marché sont utilisées dans les laboratoires de biologie et les établissements médicaux du monde entier. Ces systèmes ont de nombreuses applications, allant de l’enrichissement et la purification d’échantillons de faible concentration à l’étude des interactions entre cellules, en passant par le tri des particules et l’isolement des bactéries, des virus ou des biomarqueurs lors des diagnostics sur site de soins.
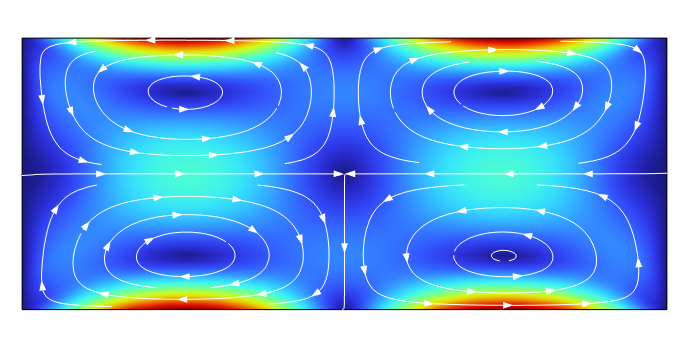
Figure 1. Lignes de courant d’un streaming acoustique dans un plan de coupe d’un canal microfluidique, qui est par exemple utilisé pour concentrer ou séparer des particules dans des échantillons de fluides biologiques.
Les ondes acoustiques induites dans les pinces acoustiques donnent lieu à des streamings acoustiques ou à des tourbillons se déplaçant rapidement autour du site de piégeage. Le streaming acoustique génère une force de traînée visqueuse sur les particules dans le fluide. Les particules sont également soumises à une force de rayonnement acoustique. Pour les grosses particules, la force de rayonnement acoustique est dominante, tandis que pour les petites particules, c’est la force de traînée qui l’est. La taille des particules à partir de laquelle il y a changement de force dominante dépend du système et des propriétés acoustiques de la particule. Dans la plupart des dispositifs, la force de rayonnement acoustique est utilisée pour piéger ou contrôler les particules; par conséquent, la force de traînée provenant du streaming acoustique empêchera généralement les petites particules en dessous d’une taille critique d’être capturées par la pince acoustique.
Avec ces informations en tête, examinons comment simuler une pince acoustique avec COMSOL Multiphysics®. Le modèle 3D Acoustic Trap and Thermoacoustic Streaming in a Glass Capillary abordé dans cet article de blog est disponible en téléchargement à partir de la Bibliothèque d’Applications.
Modélisation d’une pince acoustique
La géométrie du modèle 3D de notre pince acoustique est présentée ci-dessous. Celle-ci est découpée selon ses deux plans de symétrie, permettant de ne modéliser qu’un quart du système. Le quart d’un petit transducteur piézoélectrique (gris) est placé sous le quart d’un capillaire en verre (jaune) rempli d’eau (bleu). Comme en réalité le capillaire mesure environ 5cm, il est très long par rapport à son épaisseur de 0,48 mm et à sa largeur de 2,28 mm. On choisit donc de modéliser ses extrémités à l’aide d’une couche parfaitement adaptée (PML). Une PML est un domaine qui est ajouté à une géométrie pour simuler l’atténuation et l’absorption de toutes les ondes sortantes. La PML comprenant la moitié d’une extrémité du capillaire est représentée en vert ci-dessous. Comme vous pouvez le constater dans ce modèle, la PML est active dans le capillaire en verre ainsi que dans le fluide.
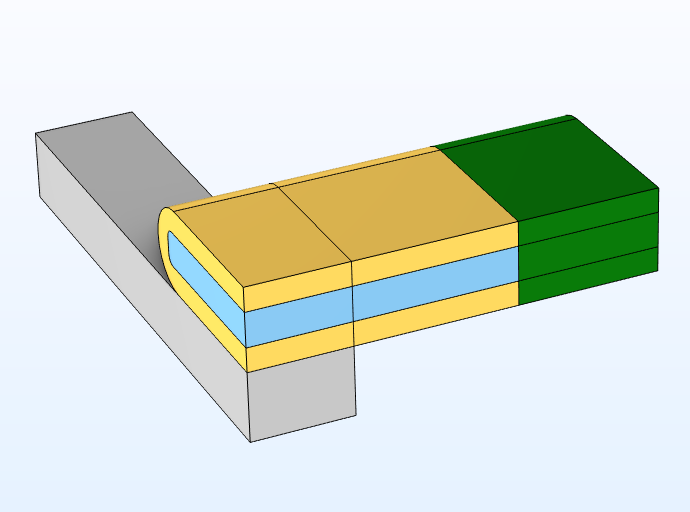
Figure 2. Géométrie représentant le quart d’un modèle de pince acoustique.
La modélisation d’une pince acoustique est un véritable problème multiphysique impliquant de l’électromagnétisme, de la mécanique du solide, de l’acoustique, de la mécanique des fluides et, dans certains cas, de la thermique. Une variation de la différence de potentiel dans le transducteur piézoélectrique induit des vibrations dans le matériau piézoélectrique et donc également dans le capillaire en verre. Cet effet piézoélectrique est modélisé en couplant l’électrostatique dans le domaine du transducteur piézoélectrique avec la mécanique du solide du transducteur piézoélectrique et du capillaire en verre. Pour modéliser le champ de pression résultant dans le fluide, une interface multiphysique acoustique–structure est utilisée à la frontière entre le capillaire en verre et le fluide afin de coupler la mécanique du solide avec la pression acoustique.
De plus, la dissipation d’énergie dans le transducteur piézoélectrique chauffe le système, ce qui créé un gradient de température dans le capillaire en verre et le fluide qui, à son tour, génère des gradients de propriétés acoustiques du fluide qui influencent le streaming acoustique. Un couplage multiphysique d’écoulement non-isotherme prend en compte les effets de ce gradient de température, en combinant la modélisation thermique de l’ensemble de la géométrie (solides et fluide) avec un modèle d’écoulement rampant dans le domaine fluide. Un couplage entre l’écoulement rampant et la pression acoustique est utilisé pour modéliser le streaming acoustique. Enfin, pour vérifier que notre pince acoustique fonctionne comme prévu, le suivi de particules est utilisé afin de déterminer les trajectoires de deux types de particules dans le fluide, de grosses particules de verre de silice et de petites particules de polystyrène.
Maintenant, jetons un oeil aux résultats !
Résultats de simulation
Champs acoustiques
Les champs acoustiques sont modélisés dans le domaine fréquentiel, le système étant piloté dans le régime des ultrasons à une fréquence de 3.84 MHz. Cette fréquence correspond à une résonance d’une demi-onde stationnaire dans la hauteur de la chambre du fluide. Le graphique ci-dessous montre le champ électrique dans le transducteur piézoélectrique, le champ de déplacement dans le transducteur piézoélectrique et le capillaire en verre généré par l’effet piézoélectrique, et le champ de pression acoustique résultant dans le fluide. Le champ acoustique contient une zone de pression minimale, appelée noeud de pression, au-dessus du transducteur piézoélectrique.
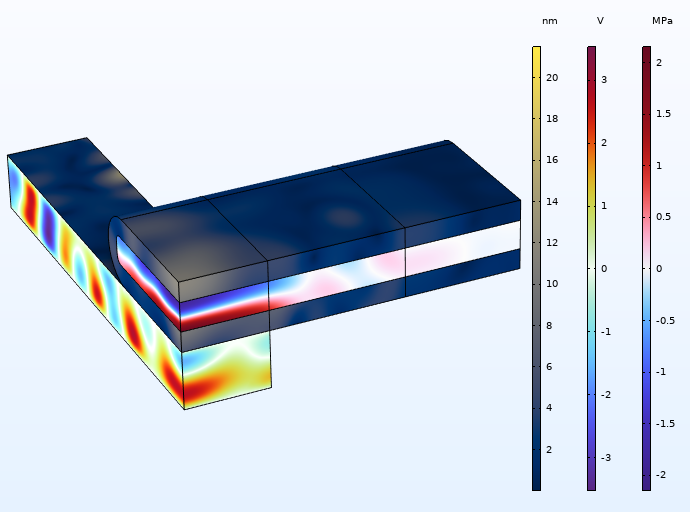
Figure 3. Champ de déplacement (nm), champ électrique, et champ de pression dans la pince acoustique.
Les forces de rayonnement acoustique agissant sur une particule dans un champ de pression acoustique peuvent être décrites par le potentiel de Gor’kov. La figure 4 montre le potentiel de Gor’kov calculé pour les petites particules de polystyrène de notre modèle. Les particules en suspension dans le fluide seront poussées vers le potentiel de Gor’kov minimal et devraient donc être piégées au centre du capillaire en verre. Pour une présentation détaillée sur la force de rayonnement acoustique et sur comment la calculer avec COMSOL Multiphysics®, se référer à l’article de blog précédent.
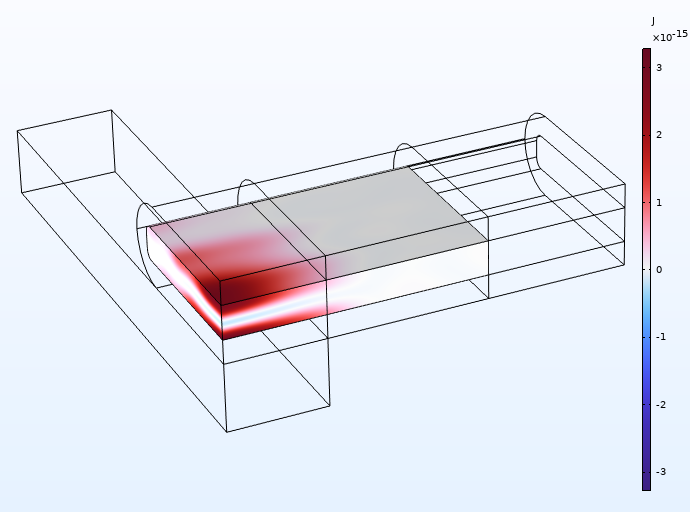
Figure 4. Potentiel de Gor’kov pour des particules de polystyrène de diamètre 1 µm.
Streaming thermoacoustique
Qu’en est-il du streaming acoustique ? Les résultats de la simulation ci-dessous montrent quatre tourbillons au-dessus du transducteur piézoélectrique, ce qui s’explique uniquement par le champ de température. Le gradient de température dans le capillaire en verre et dans le fluide, induit par le chauffage du transducteur piézoélectrique, crée des gradients de densité et de compressibilité du fluide. Ces gradients dans les propriétés du fluide, associés à l’acoustique, se traduisent par la force thermoacoustique, qui alimente le streaming acoustique et donne lieu à ce profil caractéristique de streaming.
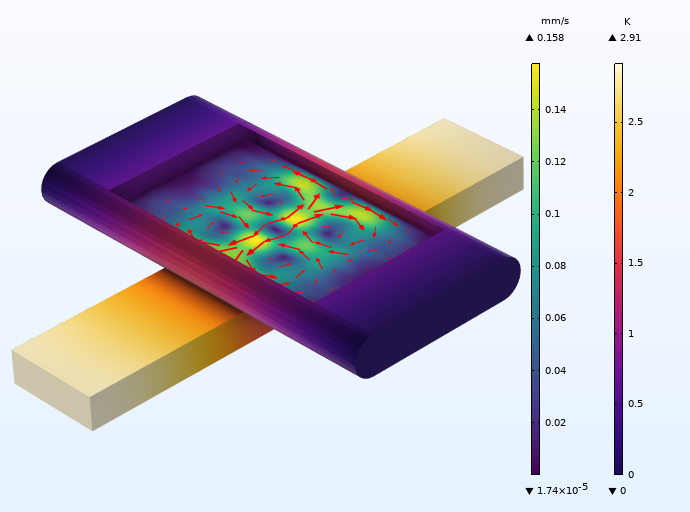
Figure 5. Streaming thermoacoustique à l’intérieur du capillaire en verre et gradients de température. Les résultats sont symétrisés par rapport aux plans de symétrie de la géométrie.
Trajectoires des particules
Avec le suivi de particules, nous pouvons également déterminer si les particules ayant certaines propriétés seront attirées dans la pince acoustique. Les animations suivantes montrent les trajectoires calculées de grosses particules de verre de silice d’un diamètre de 10 µm et les trajectoires de plus petites particules de polystyrène d’un diamètre de 1 µm. Les particules de verre de silice situées au-dessus du transducteur piézoélectrique se déplacent vers le centre du capillaire en verre et y sont piégées, tandis que le mouvement des particules de polystyrène plus petites est régi par les lignes de courant.
Figure 6. Trajectoires des grosses particules de verre de silice.
Figure 7. Trajectoires des petites particules de polystyrène.
Lancez-vous!
Intéressé d’essayer vous-même ce modèle multiphysique? Le bouton ci-dessous permet de télécharger le fichier MPH:
Pour aller plus loin
Ces tutoriels supplémentaires traitant de streaming acoustique et de pinces acoustiques sont également disponibles dans la Bibliothèque d’Applications:


Commentaires (0)